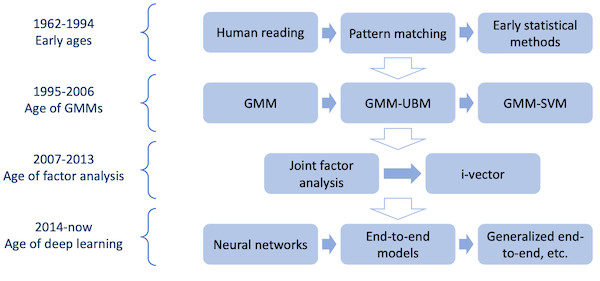
Section 6: Early Speaker Recognition Approaches
이번 Section에서는 voice identification 도메인의 딥러닝 부상 전(1995~2013)에 사용된 기술을 살펴볼 것이다.
6.1 Gaussian Distribution
First Principles of Computer Vision youtube: Gaussian Mixture Model | Object Tracking: 비전 도메인에서의 응용
배경 지식으로 Normal Distribution(정규 분포) 혹은 Gaussian Distribution(가우시안 분포)로 불리는 연속 확률 분포를 살펴보자.
가우시안 분포는 단순하고 흔할 뿐더러, Central Limit Theorem(CLT, 중심극한정리)에 따르면 다른 분포를 가우시안 분포로 쉽게 근사할 수 있다.
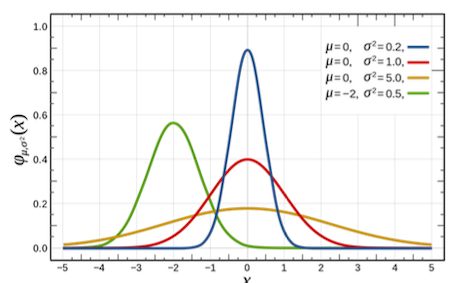
주로 로 표현한다.
-
: mean
-
: standard deviation
-
: variance
그렇다면 Cumulative Distribution Function(CDF, 누적 분포 함수)의 도함수에 해당되는 Probability Density Function(PDF, 확률 밀도 함수)는 어떻게 정의될까?
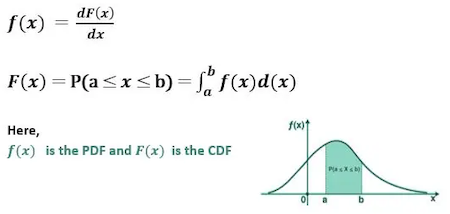
- Gaussian Distribution에서의 PDF는 다음과 같이 정의한다.
6.1.1 Multivariate Gaussian Distribution
차원의 확률 변수
가 있을 때의, Multivariate Gaussian Distribution(다변량 가우시안 분포, 다변량 정규분포)을 살펴보자.
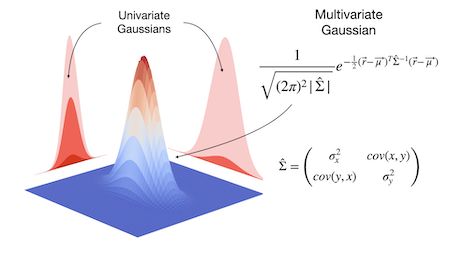
주로 로 표현한다.
-
: 차원 random vector
-
: 차원 mean vector
-
: covariance matrix(공분산 행렬)
Probability density function은 다음과 같이 정의한다.
6.1.2 Why Gaussian Distribution?
그렇다면 speaker recognition에서는 무엇을 Gaussian Distribution으로 나타낼 수 있을까?
-
특정 word/phoneme의 Fundamental frequency
-
Formants
-
Intensity
-
Signal-to-noise ratio
-
Length of a word/phoneme
6.2 Gaussian Mixture Model
Gaussian Mixture Model(GMM)의 핵심은, 어떠한 complicated distribution을 개의 Gaussian distribution의 weighted sum으로 표현될 수 있다는 아이디어이다.
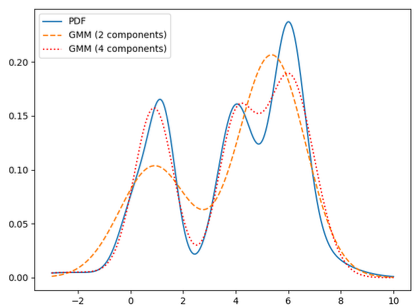
PDF는 다음과 같이 여러 Gaussian distribution의 합산으로 표현된다.
-
: 번째 Gaussian distribution의 weight
-
: weight의 총합은 1이다.
-
Gaussian
이때 모든 패러미터를 포함하는 parameter set 를 다음과 같이 정의한다.
6.2.1 Covariance matrix
가 갖는 총 패러미터 개수를 알아보자.
-
: real number 개
-
: 차원 vector 개
-
: matrix 개
-
따라서 총 #parameters는 이다.
그런데 가 크면 클수록 covariance matrix가 갖는 원소의 개수가 기하급수적으로 증가하게 되고, 따라서 overfitting을 유발할 수 있다. parameter explosion을 막기 위해서 다음과 같은 테크닉을 사용한다.
-
Sharing covariance matrix
-
각 speaker의 모든 components가 동일한 covariance matrix를 갖게 한다.
-
모든 speaker의 모든 components가 동일한 covariance matrix를 갖게 한다.
-
Simpler covariance matrix
-
full covariance matrix 대신 diagonal covariance matrix를 사용한다.
보통 각 speaker의 각 component마다 자신만의 diagonal covariance matrix를 갖도록 사용한다.
행렬의 패러미터 수가 개로 줄어들게 된다.
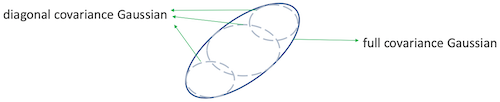
6.2.2 Diagonal Covariance Matrix
하나의 covariance Gaussian은 여러 개의 diagonal covariance Gaussian의 sum으로 표현할 수 있다.
diagonal covariance matrix의 총 패러미터 수는 다음과 같다.
- #parameters:
이때 distribution을 표현하는 식은 다음과 같이 바뀐다.
6.3 GMM for speaker modeling
Speaker Recognition에서 GMM을 이용해 speaker model를 구하는 과정은 다음과 같다.
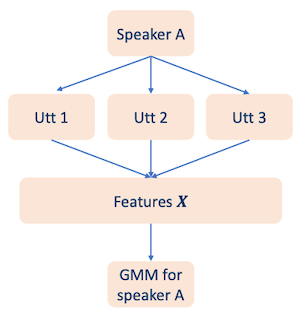
먼저 speaker A의 여러 utterance에서 acoustic feature를 추출한다.
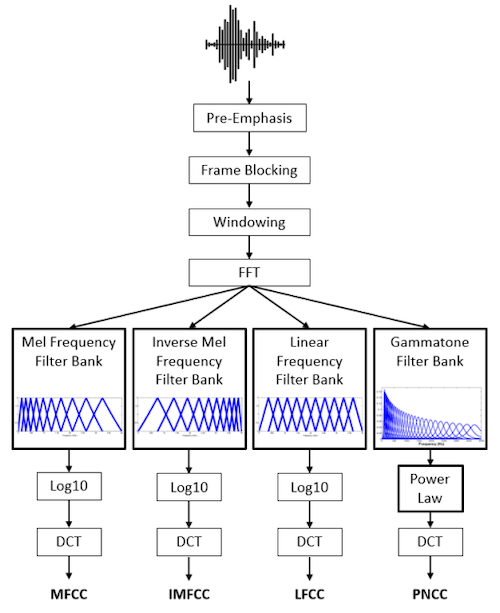
acoustic features: PLP, MFCC, LFBE 등
다음은 GMM의 parameter set 를 Maximum Likelihood Estimation(MLE)을 사용하여 추정한다.이 과정을 parameter estimation라고 하며, 다음 식에서 결과를 maximize하는 parameter set 를 찾는다.
- features
내가 가진 데이터셋에 해당된다. 는 서로 independent하다.
utterance의 길이, speaker 수, speaker model의 크기(Gaussian component 수)에 따라 계산량이 기하급수적으로 증가할 수 있다.
6.3.1 Expectation-Maximization Algorithm
이때 MLE를 풀기 위해서 Expectation-Maximization(EM) Algorithm을 사용한다.
- Initialize
random initialization 혹은 K-means clustering을 사용하여 패러미터를 로 초기화한다.
이때 각 cluster는 multivariate Gaussian distribution으로 표현된다.
- E-step
iteration 에서의 parameter set 이 있다고 하자. 각 sample 과 번째 component 사이의 'membership values'는 다음과 같이 계산할 수 있다.
- M-step
-
membership values를 바탕으로, iteration 에서의 weights를 update한다.
-
iteration 에서의 mean, diagonal covariance matrix를 update한다.
- 2(E-step), 3(M-step)을 반복한다.
종료는 (1) 정해둔 iteration 최대치에 도달하거나, (2) 이전 iteration과의 차이가 정해둔 threshold보다 작을 때를 기준으로 한다.
6.3.2 Singularities
하지만 parameter estimation 과정에서 singularities 문제를 주의해야 한다.
- 가 매우 작은 값을 갖는다면, Gaussian 계산에서 overflow가 발생할 수 있다.
따라서 singularities를 피하기 위해 다음과 같은 테크닉을 사용한다.
-
Flooring : 의 최소값을 정해준다.
-
Variance Clamping : 의 최대값을 정해준다.
6.3.3 Speaker Identification with GMM
이처럼 parameter estimation을 거치면 명의 candidate speakers를 GMM model로 표현할 수 있다. 이때 각 candidate speaker의 GMM paramters는 가 된다.
이제 새로운 acoustic feature 가 주어졌을 때, 이 feature가 어떤 candidate speaker의 것인지를 판별해야 한다. (speaker identification)
- candidate speaker의 prior probabilities(사전 확률)가 동일하다고 가정할 때, best speaker는 다음과 같이 표현할 수 있다.
6.4 Universal Background Model
하지만 위와 같은 방법은 closed set speaker identification에서 정의한 것으로, open set speaker identification에서는 활용할 수 없다.
-
imposters가 있을 수 있다.
-
Log-likelihood를 사용할 수 없다.
-
모든 speaker의 GMM를 구하기 위해, 너무 많은 parameter estimation 연산이 필요할 수 있다.
또한 몇몇 speaker에게는 충분한 data가 없을 수 있다.
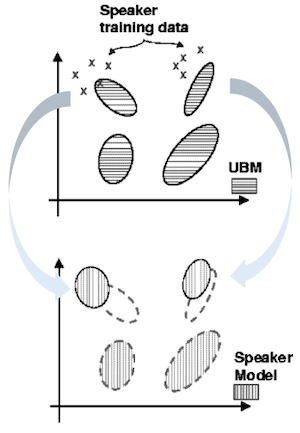
따라서 이러한 문제를 해결하기 위해 alternative speakers, imposters를 표현할 수 있는 speaker-independent GMM을 사용한다. 이를 Universal Background Model(UBM)이라고 지칭한다. UBM은 모든 speaker가 활용할 수 있는 범용적인 모델이다.
UBM을 사용하는 speaker recognition 문제는 hypothesis testing problem로 정의한다. 먼저 다음과 같이 두 가지 hypothesis를 정의해 보자.
-
: speaker 의 utterance로 가정
-
: speaker 가 아닌 다른 speaker의 utterance로 가정
이때 Log-likelihood ratio는 다음과 같이 표현할 수 있다다.
-
: speaker 의 GMM
-
: GMM-UBM
-
판단은 다음과 같이 이루어진다.
-
일 경우: accept
-
otherwise: accept
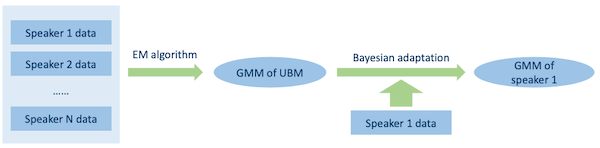
UBM은 GMM과 마찬가지로 EM algorithm을 사용하여 parameter estimation을 수행할 수 있다. 이때 다음과 같은 문제를 해결하기 위해 모든 speaker의 training data를 pooling(하나로 결합)하여 수행한다.
-
training 중에는 imposter data가 없다.
-
UBM은 반드시 speaker-independent해야 한다.
6.4.1 Bayesian Adaptation
GMM-UBM 모델을 획득했다면 individual speaker의 GMM을 추정할 수 있다. 하지만 이때 speaker의 GMM을 직접 추정하지 않고, 대신 모델의 패러미터를 Bayesian adaptation을 사용하여 각 speaker data에 adapt시키는 방법으로 구한다.
-
모든 GMM은 동일한 UBM을 사용하여 adaptation한다.
-
adaptation은 insufficient data만으로도 가능하다.
6.4.1.1 Different adaptation strategies
Bayesian adaptation을 적용할 때, weight, means, covariances의 adapt/freeze 여부를 결정해야 한다.
-
adapt everything(weights, means, covariances)
-
adapt weights / freeze means, covariances
-
adapt means, covariances / freeze weights
-
adapt means / freeze weights, covariances
이 중에서 4번째가 가장 optimal한 방법이다. 또한 모든 components가 갖는 means를 하나의 벡터로 결합하여 표현하는 경우가 많은데, 이러한 concatenated vector를 supervector라고 한다.
📝 예제 1: supervector 차원 구하기
하지만 주의할 점은 supervector가 갖는 dimensionality가 너무 클 수 있다. 다음 예시에서 supervector가 갖는 차원을 구하라.
-
acoustic feature: 39차원 MFCC
-
GMM: 512개 components
🔍 풀이
supervector가 갖는 차원은 당므과 같다.
또한 supervector는 speaker의 다른 information, 예를 들어 microphone, acoustic environment(room reverberation 등), background noise 등을 포함할 수 있으므로 주의해야 한다.
6.4.2 training workflow
GMM-UBM을 이용한 speaker model의 training workflow을 요약하면 다음과 같다.
-
speaker-independent한 UBM을 훈련한다.
-
각 speaker의 feature data를 가지고, Bayesian adaptation을 통해 각 speaker의 GMM을 구한다.
6.5 Support Vector Machine(SVM)
Support Vector Machine(SVM)은 classification, regression 등 많은 분야에서 사용되는 대표적인 기계학습 방법 중 하나이다. 특히 딥러닝 모델의 부상 전, speaker recognition에서 GMM-SVM이 굉장히 많이 사용되었다.
SVM은 maximum-margin principle을 기반으로 한다. 예를 들어 다음과 같은 binary classification 데이터셋이 있다고 하자.
-
: feature vector
-
; binary ground truth label
목표는 , 을 구분하는 hyperplane 를 찾는 것이다. 동시에 margin은 최대화해야 한다.
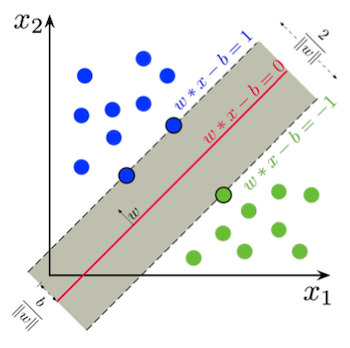
파란색 점: data = 1 / 초록색 점: data = -1 / 직선: hyperplane
-
hyperplane에 위치한 점을 support vector라고 지칭한다.
-
margin :
따라서 margin을 최대화하려면 norm 를 최소화해야 한다.
이때 line과 가장 가까운 파란색 점, 초록색 점과의 거리는 일치한다.
- constraint는 다음과 같이 표현할 수 있다.
6.5.2 Linear SVM with soft margin
하지만 언제나 두 class가 linearly seperable하다는 보장은 없다. 따라서 어느 정도의 오차를 허용하는 soft-margin을 도입한다. 이때 주로 사용하는 손실 함수가 hinge loss이다. 기본적으로 두 가지를 최소화하는 것을 목표로 한다.
-
classification error (hinge loss)
-
margin size
다음 soft margin을 사용하는 linear SVM 예시 그림을 살펴보자.
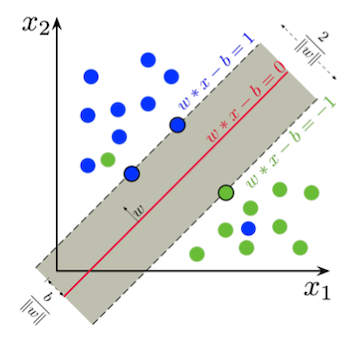
- hinge loss
-
soft-margin SVM
-
: 두 targets 사이의 tradeoff를 조절하는 패러미터
이때 문제를 와 를 최적화하는 문제로 볼 수 있다. 새로운 데이터 를 입력으로 주면서 scoring function을 계산해 나간다.
6.6 Non-linear SVM
하지만 실제 응용에서는 linear classification을 적용할 만큼 feature space가 이상적인 경우는 적다. 따라서 먼저 feature space에 적용할 non-linear transform 을 찾아야 한다. Non-linear SVM은 다음과 같은 과정으로 진행된다.
-
모든 feature 를 로 변환한다.
-
에 linear SVM을 적용한다.
6.6.1 Kernel trick
kernel trick을 이용하면 non-linear transform 를 찾을 필요 없이, kernel function만을 정의해서 연산을 수행할 수 있다.
- kernel function
-
scoring function
-
: 거의 대부분의 경우에서 0이며, support vector에 해당하는 경우에만 0이 아닌 값을 갖는다. (training 과정을 통해 구한다.)
6.6.2 Commonly used kernel functions
주로 사용하는 kernel functions으로는 다음과 같은 종류가 있다.
- Degree-d polynomial kernel
- Degree-d homogeneous polynomial kernel
- Radial Basis Function(RBF) kernel
가장 보편적으로 사용하는 kernel function이다.
- Hyperbolic tangent kernel ( )
6.7 Kernel functions for speaker recognition
6.7.1 GMM supervector linera kernel
앞서 GMM-UBM에서 구한 supervector를 사용하여, kernel function으로 다음과 같은 linear kernel을 정의할 수 있다.
-
, : 두 utterance , 가 주어졌을 때의 각 adapted means
-
, : UVM의 weights, covariances
6.7.2 GMM L2 inner product kernel
GMM supervector linear kernel보다 성능은 좋지 않으나 다음과 같이 kernel function을 정의할 수도 있다.
original GMM-UBM보다는 훨씬 좋은 성능을 갖는다.
6.8 Workflow of GMM-SVM
GMM-SVM의 workflow를 요약하면 다음과 같다.
-
먼저 UBM을 구한다.
-
각 utterance를 가지고 adapt시킨다.
-
kernel function을 사용해 (speaker를 분류하는) non-linear SVM classifier를 학습한다.
여기서 GMM-UBM과 가장 큰 차이점은 두 가지를 들 수 있다.
-
GMM을 speaker가 아닌 utterance를 나타내기 위해 사용한다.
-
각 speaker는 SVM classifier를 통해 구분된다.