2 ARM Processor Fundamentals
2.3 Pipeline
다음은 명령어를 병렬로 처리하는 pipelining 기법을 간략히 3단계로 표현한 그림이다. (1 stage = 1 cycle)
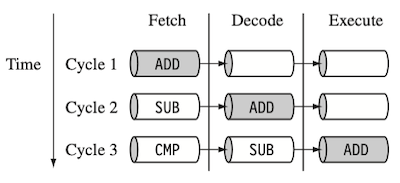
- 파이프라인에서 명령어는 Execute 단계에서 처리되므로, stage의 수가 많으면 그만큼 긴 latency를 갖는다.
(파이프라인에 명령어를 모두 채운 steady state가 될 때까지의 지연시간)
단, ARM 계열에 따라서도 파이프라인 설계가 다르므로 유의해야 한다.
ARM9 ARM10


2.3.1 Pipeline Executing Characteristics
cycle 1~4 동안 파이프라인 stage를 나타낸 예시를 살펴보자.
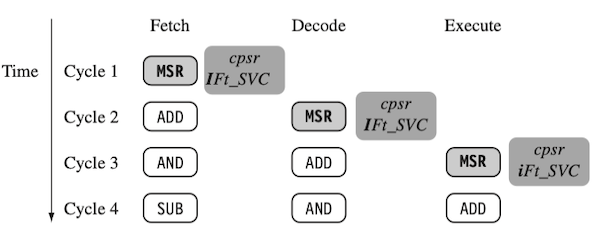
MSR(Mode Status Register)
execute stage가 끝날 때 cpsr 레지스터의 I bit를 0으로 설정(clear)하는 것으로, IRQ(Interrupt Request)가 활성화된다.
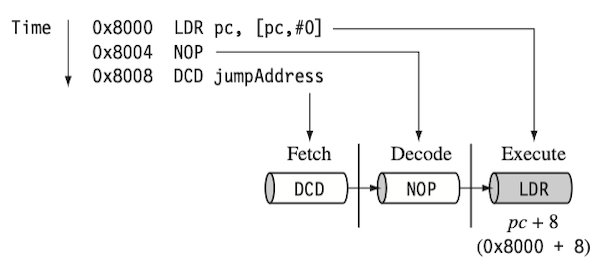
pc(Program Counter)
Execute stage의 pc 값은, 최종적으로 8 bytes 만큼 증가한다.
참고로
pc값은 stage마다 자동으로 4 bytes씩 증가한다. (Thumb mode: 2 bytes씩 증가)
LDR: load to register,NOP: no operation,DC*: 데이터 할당(e.g.,DCD: 워드 데이터)
[pc + #0]: 현재pc가 가리키는 주소를 load.Execute 단계에서는 8 bytes 만큼 증가하게 된다. (
0x80000x8008)
2.4 Exceptions, Interrupts, Vector Table
인터럽트 발생 시, pc는 벡터 테이블 내 특정 주소를 가리키도록 설정된다.
-
Vector Table: 각 entry는, 예외 혹은 인터럽트 처리 루틴으로 분기하는 주소를 가리킨다.
-
Software Interrupt vector: SWI 명령 실행 시, OS 루틴을 호출하면서 주로 사용 (0x00000008 번지)
일부 프로세서는 high address로부터 벡터 테이블을 시작한다.
| Exception/interrupt | Shorthand | Address | High address |
|---|---|---|---|
| Reset | RESET | 0x00000000 | 0xffff0000 |
| Undefined instruction | UNDEF | 0x00000004 | 0xffff0004 |
| Software interrupt | SWI | 0x00000008 | 0xffff0008 |
| Prefetch abort | PABT | 0x0000000c | 0xffff000c |
| Data abort | DABT | 0x00000010 | 0xffff0010 |
| Reserved | - | 0x00000014 | 0xffff0014 |
| Interrupt request | IRQ | 0x00000018 | 0xffff0018 |
| Fast interrupt request | FIQ | 0x0000001c | 0xffff001c |
2.5 Core Extensions
ARM core의 옆에 위치하여 성능을 향상시키거나 다양한 기능을 제공한다.
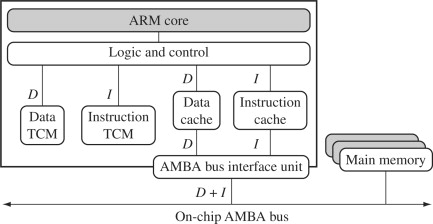
2.5.1 Cache and Tightly Coupled Memory(TCM)
cache는 core와 main memory 사이에 있는 fast memory block으로, 효율적으로 데이터를 저장하고 가져오기 위해 사용된다.
ARM 기반 임베디드 시스템은 주로 single-level 캐시를 사용한다.
다음은 core와 cache를 연결하는 두 가지 대표적인 구조이다. 이때, 하버드 구조에서는 실시간 알고리즘에서 캐시의 non-deterministic한 지연시간을 개선하기 위해, fast SRAM 메모리인 Tightly Coupled Memory(TCM)를 사용한다.
| 폰 노이만 구조 (Von Neumann style) |
하버드 구조 (Harvard style) |
|---|---|
 |
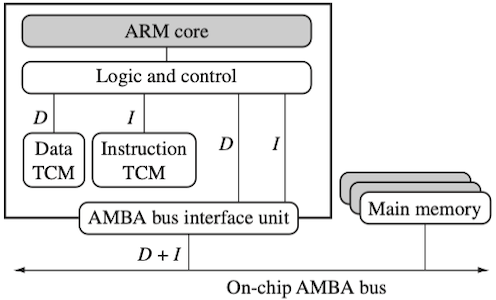 |
| memory, instruction: unified cache로 결합 | memory TCM, instruction TCM 별도 구현 |
| ARM 7 | ARM 9, 10, 11 |
실시간 시스템에서는 코드 실행 시간이 deterministic해야 하며, 명령이나 데이터를 load/store하는 시간을 예측할 수 있어야 한다.
참고로 두 구조를 결합하여 각각의 장점을 취한 hybrid architecture도 존재한다.
2.5.2 Memory Management Hardware
임베디드 시스템은 메모리 장치를 여러 개 가지는 경우가 많으므로, 부적절한 메모리 접근을 막는 장치가 필요하다. 다음은 ARM에서 메모리 보호를 위해 사용되는 세 가지 유형의 하드웨어를 나타낸다.
| Type | Protection | Features |
|---|---|---|
| Non-protected memory | 보호를 제공하지 않음 | fixed, very little flexibility 작고 단순한 임베디드 시스템에서 사용 |
| MPU(Memory Protection Unit) | simple한 보호 제공 | coprocessor register set으로 제어 비교적 단순한 memory map을 갖는 시스템에서 사용 |
| MMU(Memory Management Unit) | comprehensive한 보호 제공 | virtual address를 활용한다. 멀티테스킹을 지원하는 정교한 플랫폼에서 사용 |
2.5.3 Coprocessor
ARM 프로세서와 연결되어, 명령어 집합의 확장 기능 혹은 configuration register set 역할을 수행한다. (전용 ARM 명령어를 사용)
- e.g., coprocessor 15(
CP15): cache, TCM를 제어하고 memory management를 수행한다.
4, 11-12: UNUSED | CP15
Register | Read | Write | | --- | --- | --- | | 0 | ID code | Unpredictable | | 0 | Cache type | Unpredictable | | 1 | Control | Control | | 2 | Translation table base | Translation table base | | 3 | Domain access control | Domain access control | | 4 | Unpredictable | Unpredictable | | 5 | Fault status | Fault status | | 6 | Fault address | Fault address | | 7 | Unpredictable | Cache operations | | 8 | Unpredictable | TLB operations | | 9 | Cache lockdown | Cache lockdown | | 10 | TLB lockdown | TLB lockdown | | 11 | Unpredictable | Unpredictable | | 12 | Unpredictable | Unpredictable | | 13 | FCSE PID | FCSE PID | | 14 | Unpredictable | Unpredictable | | 15 | Test configuration | Test configuration |
-
명령어에서
register 0은opcode_2field에 따라 읽는 레지스터가 달라진다. -
MRC p15,0,Rd,c0,c0,0: ID code register를 읽는다. -
MRC p15,0,Rd,c0,c0,1: Cache type register를 읽는다.