1 ARM Embedded System
ARM core는 core만이 아니라, 일관된 설계 원칙과 공통적인 명령어 집합을 공유하는 설계 집합을 의미한다.
RISC-V 정리 문서(Computer Organization and Design RISC-V Edition)
아키텍처에서 사용하는 instruction set은, 대표적으로 RISC와 CISC의 두 가지 design philosophy로 구분된다.
| CISC (Complex Instruction Set Computer) |
RISC (Reduced Instruction Set Computer) |
|
|---|---|---|
 |
 |
|
| complexity | 명령어 복잡 HW에 의존 |
명령어 단순 컴파일러(SW)에 의존 |
| #instructions | 많음 | 적음 |
| instruction size | 가변적 | 고정 |
| #registers | 적음 | 많음 |
1.1 RISC Design Philosophy
ARM은 RISC 구조를 갖는다. RISC는 1 clock 내 실행되는 단순하고 빠른 명령어가 주된 특징이다. RISC는 다음 4가지 대표적인 설계 원칙을 기본으로 한다.
| 설계 원칙 | 특징 | CISC와 비교 |
|---|---|---|
| instructions | - 고정 크기(bits)로 구성 - 1 cycle 내 수행되는 단순한 연산 위주 설계 (나눗셈 등 복잡한 연산은, 단순한 연산을 조합해서 구현) |
CISC는 가변 크기 명령어를 갖고, 여러 사이클에 걸쳐 실행 (또한, microcode라는 보다 작은 단위로 세분화된다.) |
| pipelines | - 명령어를 병렬적으로 실행 - 1 cycle에 한 단계씩 진행 |
microcode 등 miniprogram 단위로 실행 |
| registers | - 다수의 범용 레지스터로 구성 - 데이터 혹은 메모리 주소를 포함 |
반면, CISC는 목적에 따라서 레지스터를 소유 (e.g., AX(Accumulator), BX(Base address), CX(Count), DX(Data), ...) |
| load-store architecture | - 피연산자(operand)는 반드시 레지스터에 적재되어 있어야 한다. - 레지스터 뱅크와 메모리 사이 데이터는, load/store 명령을 통해 전송 |
CISC는 operand가 메모리에 있어도 무방하다. |
1.2 ARM Design Philosophy
ARM 아키텍처는 RISC의 설계 원칙을 따르며, 다음과 같은 특징을 갖는다.
| 특징 | 설명 |
|---|---|
| variable cycle execution for certain instructions | 실행 사이클이 가변적인 일부 명령어를 제공 (e.g., load-store-multiple) |
| inline barrel shifter | 명령어를 보다 복잡하게 수행 가능 |
| Thumb mode | 16-bit 명령어 집합을 제공한다. (code density 면에서 32-bit 대비 30% 이상 유리) |
| conditional execution | 고비용의 branch instruction 대신 사용하여 최적화 가능 |
| DSP(Digital Signal Processor) 확장 명령 | 신속한 16x16 multiplier/saturation를 제공 |
참고로, ARM 디버깅은, 내장된 ICE(In-Circuit Emulator)를 사용하여 trap(interrupt)을 발생시킨다.
1.3 Embedded System Hardware
다음은, ARM 기반 임베디드 장치(microcontroller)의 구성 요소를 나타낸 그림이다.
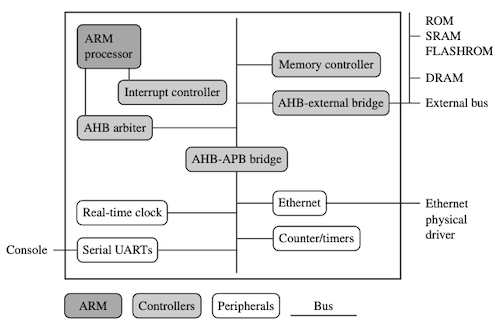
| 구성 요소 | 설명 |
|---|---|
| ARM processor | 명령어 실행 엔진인 core bus를 통해 직접 인터페이스하는 컴포넌트와 함께 구성(e.g., cache, MMU) |
| controller | 중요한 시스템 기능을 제어(e.g., interrupt controller, memory controller) |
| peripherals | 칩 외부와의 입출력을 제공 |
| bus | 서로 다른 컴포넌트 간 통신에서 사용 |
MMU(Memory Management Unit): 가상 주소를 물리 주소로 변환하는 장치
1.3.1 ARM Bus Technology
ARM 임베디드 시스템에서는 internal on-chip bus를 통해 주변장치(peripherals)와 연결된다. (이때 core와 주변장치는 마스터-슬레이브 관계로 bus와 연결된다.)
반면 x86 PC의 경우, external off-chip bus인 PCI(Peripheral Component Interconnect) bus를 주로 사용한다.
| 종류 | 설명 |
|---|---|
| bus master(ARM core) | 데이터 전송을 개시할 수 있다. |
| bus slave | master에 데이터 전송에 응답할 수 있다.(응답만 가능) |
참고로 bus는 2단계 아키텍처 레벨을 가지며, 각 레벨은 다음과 같이 역할이 구분된다.
level 설명 물리 단계(physical level) electrical characteristics 및 bus width(16, 32, 64 bits) 프로토콜 단계(protocol level) 프로세서와 주변장치 사이의 통신 규칙(protocol)
1.3.2 AMBA Bus Protocol
1996년 ARM에서 도입한 AMBA(Advanced Microcontroller Bus Architecture)은, 각기 다른 프로세서 아키텍처에서도 주변장치 설계를 재사용할 수 있도록 한 standard bus protocol이다.
AMBA는 세 가지 버스 설계로 구성된다.
- AHB(ARM High-performance Bus): 고성능 주변장치용 버스
(ASB 같은 양방향 아닌) 중앙 집중형 다중 버스 방식. 64, 128 bits 버스폭을 허용하며, 높은 throughput을 제공한다.
-
APB(ARM Peripheral Bus): 저성능 주변장치용 버스
-
ASB(ARM System Bus)
참고로, AHB는 두 가지 변형이 존재한다. 서로 protocol은 같으나 interconnect가 다르다.
- interconnect: bus, ring, mesh 등 연결 형태
bus 기법 설명 기타 Multi-layer AHB 다중 버스 마스터 허용 multi-processor에 적합 AHB-List 단일 버스 마스터 제한 AHB의 subset에 해당
1.3.3 Memory
다음은 각 memory hierarchy(메모리 계층) 내 메모리의 장단점을 비교한 그래프와 도표이다.
- 프로세서 코어에 가까운 메모리일수록, 성능은 우수하나, 비용은 높고 용량은 작다.
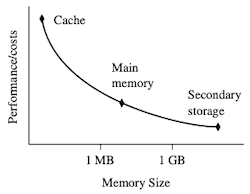
| 메모리 계층 | 크기 예 | 구현 예 | 특징 |
|---|---|---|---|
| cache | ~16MB | On-chip/SRAM | - 메모리 접근 overhead를 줄이며 성능을 향상시킨다. - (-) 예측이 어려운 까닭에, real-time system response에 도움이 되지 않는다. |
| main memory | ~16GB | DRAM | load/store 명령을 통해 접근 |
| secondary storage | 100GB~ | HDD, CDR, NAND flash |
다음은 임베디드 시스템에서 사용되는, 대표적인 메모리를 종류별로 정리한 도표이다.
| 메모리 종류 | 읽기/쓰기 가능 여부 | 특징 |
|---|---|---|
| ROM(Read-Only Memory) | X (변경 불가) |
- 주로 boot loader, firmware 등 저장에 사용 |
| Flash ROM | O | - 대용량 저장 장치 대체 - 쓰기가 매우 느리며, 전적으로 SW가 제 |
| DRAM(Dynamic Random Access Memory) | O | - 주기적인 refresh가 필요 - 별도의 컨트롤러가 필요 |
| SRAM(Static Random Access Memory) | O | - 주로 cache, 고속 메모리 용도로 활용 - refresh 불필요하지만, DRAM보다 더 넓은 면적 필요 |
| SDRAM(Synchronous DRAM) | O | - 프로세서 버스와 동기적으로 작동 - 셀에서 읽힌 후 파이프라인 방식으로 버스에 burst |
1.3.3.1 Memory Width
bit width는 성능 및 비용에 직접적인 영향을 미치는 요소로, 일반적으로 8, 16, 32, 64 bits를 사용한다.
ARM 프로세서에서는 16 bit Thumb 명령어를 제공하며, 이를 16-bit-wide 메모리와 조합할 수 있다.
다음은 ARM 32-bit와 Thumb 16-bit 명령어의 fetch 사이클을, 다양한 bit-wide 메모리에서 비교한 도표다.
| instruction size | 8-bit memory | 16-bit memory | 32-bit memory |
|---|---|---|---|
| ARM 32-bit | 4 cycles | 2 cycles | 1 cycle |
| Thumb 16-bit | 2 cycles | 1 cycle | 1 cycle |
1.3.4 Peripheral Devices
주변장치는 다른 off-chip 장치나 센서와 연결되어, chip에 대해 입출력 기능을 수행한다.
간단한 serial communication 장치부터, 복잡한 무선 장치 등 다양
- 모든 ARM 주변장치는 memory-mapped I/O, 즉 메모리에 mapping되어 있다.
메모리 주소를 가진 레지스터 집합을, 프로그래밍 인터페이스로 사용한다. (레지스터 메모리 주소는 해당 주변장치의 base address에서 offset 기반으로 계산된다.)
예를 들어, 이더넷 컨트롤러의 status, buffer, control register 등이 메모리 주소에 매핑된다.
반대는 I/O-mapped 방식으로, I/O 장치 전용 명령어를 갖는다. (e.g., inb, outb) (Intel)
주변장치 중 controller(메모리, 인터럽트 컨트롤러)는 특수 목적 주변장치에 해당된다.
| 종류 | 설명 |
|---|---|
| memory controller | - 다양한 유형의 메모리를 bus에 연결 - 특정 메모리 장치를 활성화 및 초기화 |
| interrupt controller | - 어떤 장치가, 어떤 시간에 프로세스를 인터럽트할지 SW적으로 설정 |
참고로 인터럽트 컨트롤러는, 표준 인터럽트 컨트롤러(standard Interrupt Controller)와 VIC(Vector Interrupt Controller) 두 가지 유형이 있다.
VIC: 인터럽트를 우선순위화하고, 인터럽트별 handler 주소를 관리한다.
1.4 Embedded System Software
다음은 임베디드 시스템 소프트웨어의 대표적인 구성 요소이다.
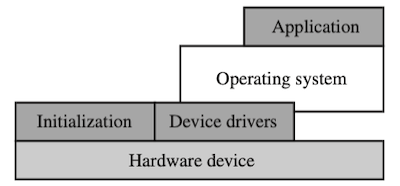
| 구성 요소 | 설명 |
|---|---|
| initialization code | 운영체제 실행 전, 최소한의 기능 초기화 |
| operating system(OS) | application 제어 및 하드웨어 관리 |
| device driver | 컨트롤러와 상호 작용 및 장치 연산 수행(장치 초기화, 인터럽트 요청 등) |
| application | 특정 task를 수행하기 위한 code |
1.4.1 Initialization (Boot) Code
boot loader는 전원이 인가(power-up)된 후 Boot ROM에서 처음으로 실행되는 프로그램으로, 프로세서를 reset 상태에서 OS를 실행할 수 있는 상태로 전환시킨다.
reset 상태에서 Boot ROM은 0x00000000에 매핑되어 있다.
일반적으로 메모리 컨트롤러 및 캐시를 셋업하고, 일부 장치를 초기화한다. 다음은 이러한 boot loader의 주요 기능이다.
| 주요 기능 | 설명 |
|---|---|
| 초기 HW 설정(configuration) | - memory remapping 수행 - 주로 booted image의 요구사항에 맞추는 작업 수행 |
| 진단(diagonstics) | HW 상태를 확인하고, 문제가 있는 경우 알림 전달 (e.g., memory test, I/O test) |
| 부팅(booting) | image를 load하고, PC를 image의 시작 주소로 수정하여 제어권 전달 (image loading에는 코드 및 데이터를 포함한다.) |
-
초기 HW 설정(memory map 재구성 등)
-
시스템 작동 진단(dignostics)
이때, ROM에 저장된 OS를 RAM으로 복사하는 memory remapping이 수행되며, 0x00000000에 RAM을 배치한다.
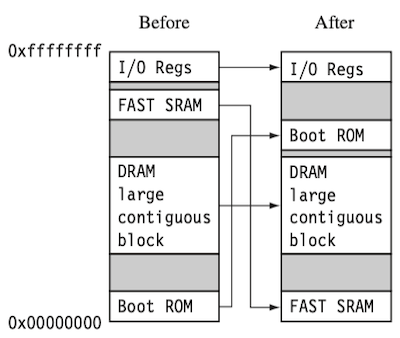
RAM에는 *exception vector table(예외 백터 테이블)가 있을 수 있고, 이 과정을 통해 프로그래밍이 가능하게 된다.
1.4.2 Operating System
Operating System(OS, 운영체제)는 크게 RTOS(Real-Time OS)과 platform OS(general-purpose OS)의 두 종류로 분류한다.
| 종류 | 설명 | 특징 |
|---|---|---|
| RTOS | 이벤트에 대해 response time 보장 | 세부적으로 hard, soft로 나뉜다. |
| platform OS | 일반적인 OS(e.g., Linux, Windows) | 메모리 관리 유닛 및 보조 저장 장치 필요 |
둘을 혼합한 하이브리드 OS도 있다.(e.g., xenomai)
1.4.3 Application
(생략)
게이트웨이, 모뎀, 88.11 무선 통신 등, 모바일 장치, 인쇄 장치 등