Chapter 07 Semaphore Management
세마포어는 세마포어 수를 세는 INT16U 카운터(0~65535)와, 대기 중인 task를 위한 wait list를 가지고 있다. 다음은 세마포어 관리 서비스를 제공하는 함수와, 이를 활성화하는 변수(OS_CFG.H에서 설정)를 나타낸 도표이다.
| Semaphore Management Service | 설명 | 옵션(1 설정 시 활성화) |
|---|---|---|
OSSemAccept() |
대기 없이 세마포어 획득(non-blocking) | OS_SEM_ACCEPT_EN |
OSSemCreate() |
세마포어 생성 | |
OSSemDel() |
세마포어 삭제 | OS_SEM_DEL_EN |
OSSemPend() |
세마포어 대기 | |
OSSemPost() |
세마포어 신호 전달 | |
OSSemQuery() |
세마포어 상태 정보 획득 | OS_SEM_QUERY_EN |
7.1 Relationship between Task, ISR, and Semaphore
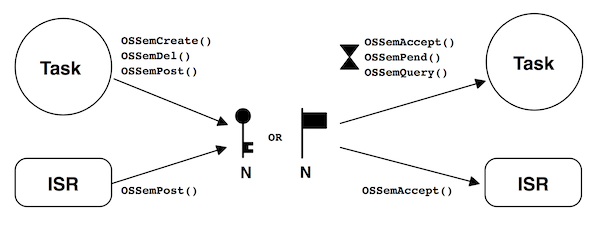
다음은 task, ISR과 세마포어 간의 관계를 나타낸 도식이다.
세마포어는 열쇠, 혹은 깃발 기호(이벤트 발생을 알리기 위해 사용할 경우)로 표시한다.
-
: 사용 가능한 리소스 수
-
이진 세마포어(mutex)의 경우,
-
ISR에서는 세마포어를 생성(
OSSemCreate())하거나 삭제(OSSemDel())할 수 없다. 또한, 세마포어를 대기(OSSemPend())할 수 없다.
7.2 Creating Semaphore: OSSemCreate()
다음은 세마포어를 생성하는 OSSemCreate() 함수이다.
-
OSIntNesting > 0: ISR에서는 세마포어를 생성할 수 없다. -
OSEventFreeList에서 ECB를 가져와서 초기화하고, 해당 ECB를 반환한다. -
OS_EventWaitListInit()함수 호출하여 초기화 -
OSEventCnt: 1일 경우 binary semaphore -
!= (OS_EVENT *)0: 유효성(NULL) 검사
OS_EVENT *OSSemCreate(INT16 cnt)
{
OS_EVENT *pevent;
if (OSIntNesting > 0) return ((OS_EVENT *)0);
OS_ENTER_CRITICAL();
pevent = OSEventFreeList;
if (OSEventFreeList != (OS_EVENT *)0) {
OSEventFreeList = (OS_EVENT *)OSEventFreeList->OSEventPtr;
}
OS_EXIT_CRITICAL();
if (pevent != (OS_EVENT *)0) {
pevent->OSEventType = OS_EVENT_TYPE_SEM;
pevent->OSEventCnt = cnt;
pevent->OSEventPtr = (void *)0;
OS_EventWaitListInit(pevent);
}
return (pevent);
}
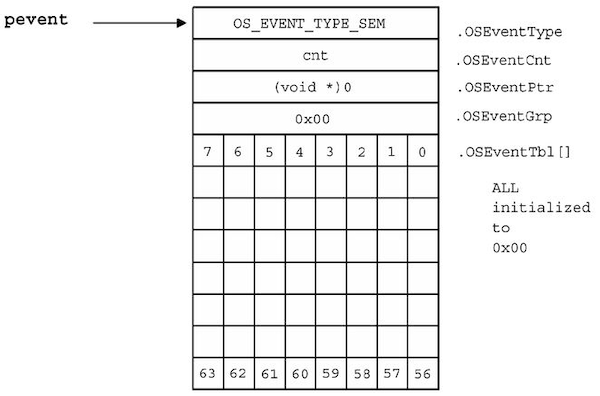
다음은 OSSemCreate() 함수가 초기화 후 반환한 ECB를 나타낸 도식이다.
7.3 Deleting Semaphore: OSSemDel()
다음은 세마포어를 삭제하는 OSSemDel() 함수이다. 삭제 이전에, 먼저 세마포어에 접근하는 모든 task부터 삭제해야 한다.
-
tasks_waiting: 대기 중인 task가 있다면 TRUE, 없다면 FALSE -
OSEventFreeList에 ECB를 반납한다. -
OSEventType = OS_EVENT_TYPE_UNUSED: ECB를 사용되지 않은 것으로 표기 -
인자
opt에 따라 다르게 실행된다. -
opt = OS_DEL_NO_PEND: pending task가 없을 때만 삭제 -
opt=OS_DEL_ALWAYS: 세마포어를 대기 중인 모든 작업을 Task Ready 상태로 전환하고, 더 높은 우선순위 task가 깨어날 수 있으므로OS_Sched()를 호출한다.
OS_EVENT *OSSemDel (OS_EVENT *pevent, INT8U opt, INT8U *err)
{
BOOLEAN tasks_waiting;
...
OS_ENTER_CRITICAL();
if (pevent->OSEventGrp != 0x00) tasks_waiting = TRUE;
else tasks_waiting = FALSE;
switch (opt) {
case OS_DEL_NO_PEND:
if (tasks_waiting == FALSE) {
pevent->OSEventType = OS_EVENT_TYPE_UNUSED;
pevent->OSEventPtr = OSEventFreeList;
OSEventFreeList = pevent;
OS_EXIT_CRITICAL();
*err = OS_NO_ERR;
req
} else {
OS_EXIT_CRITICAL();
*err = OS_ERR_TASK_WAITING;
return (pevent);
}
csae OS_DEL_ALWAYS:
while (pevent->OSEventGrp != 0x00) {
OS_EventTaskRdy(pevent, (void *)0, OS_STAT_SEM);
}
pevent->OSEventType = OS_EVENT_TYPE_UNUSED;
pevent->OSEventPtr = OSEventFreeList;
OSEventFreeList = pevent;
OS_EXIT_CRITICAL();
if (tasks_waiting == TRUE) OS_Sched();
*err = OS_NO_ERR;
return ((OS_EVENT *)0);
default:
OS_EXIT_CRITICAL();
*err = OS_ERR_OPT_INVALID;
return (pevent);
}
}
7.4 Waiting on Semaphore (Blocking): OSSemPend()
현재 task가 세마포어를 획득할 수 없다면, 세마포어 대기 상태로 전환한다. 이때, OSSemPend() 함수를 사용한다.
-
OSEventCnt > 0: 카운트가 0보다 크면 1 감소시키고 return한다. -
Task Ready 상태로 전환(
OSTCBStat |= OS_STAT_SEM)하고,OS_Sched()를 호출하여 context switching한다. -
(OSTCBStat & OS_STAT_SEM): 만약 세마포어 대기 상태로 task가 재개되었다면, timeout으로 깨어난 것이다.
에러로
OS_TIMEOUT을 반환한다.
void OSSemPend (OS_EVENT *pevent, INT16U timeout, INT8U *err) {
OS_ENTER_CRITICAL();
if (pevent->OSEventCnt > 0) {
pevent->OSEventCnt--;
OS_EXIT_CRITICAL();
*err = OS_NO_ERR;
return;
}
OSTCBCur->OSTCBStat |= OS_STAT_SEM;
OSTCBCur->OSTCBDly = timeout;
OS_EventTaskWait(pevent);
OS_EXIT_CRITICAL();
OS_Sched();
OS_ENTER_CRITICAL();
if (OSTCBCur->OSTCBStat & OS_STAT_SEM) {
OS_EventTO(pevent);
OS_EXIT_CRITICAL();
*err = OS_TIMEOUT;
return;
}
OSTCBCur->OSTCBEventPtr = (OS_EVENT *)0;
OS_EXIT_CRITICAL();
*err = OS_NO_ERR;
}
7.5 Signaling Semaphore: OSSemPost
OSSemPost() 함수는 신호를 보내, 세마포어를 획득한 task를 깨우는 역할을 수행한다.
OSEventGrp != 0x00: ECB wait list가 비어있는지 확인 후,OS_EventTaskRdy()를 호출하여 대기 중인 task를 깨운다.
OS_EventTaskRdy()내부에서OSEventCnt를 증가시키므로, 여기서는 증가시킬 필요가 없다.
-
반면, 깨어줄 task가 없다면,
OSEventCnt를 1 증가시킨다. -
OS_SEM_OVF: 오버플로 발생
INT8U OSSemPost (OS_EVENT *pevent)
{
OS_ENTER_CRITICAL();
if (pevent->OSEventGrp != 0x00) {
OS_EventTaskRdy(pevent, (void *)0, OS_STAT_SEM);
OS_EXIT_CRITICAL();
OS_Sched();
return (OS_NO_ERR);
}
if (pevent->OSEventCnt < 65535) {
pevent->OSEventCnt++;
OS_EXIT_CRITICAL();
return (OS_NO_ERR);
}
OS_EXIT_CRITICAL();
return (OS_SEM_OVF);
}
7.6 Getting Semaphore without Wating(Non-blocking): OSSemAccept()
OSSemAccept() 함수는 대기 없이 세마포어를 획득하는 함수이다.
-
cnt를 반환한다. -
cnt > 0: 1 감소시키고 반환 -
otherwise: 그대로 반환한다.
INT16U OSSemAccept (OS_EVENT *pevent)
{
OS_ENTER_CRITICAL();
cnt = pevent->OSEventCnt;
if (cnt > 0) {
pevent->OSEventCnt--;
}
OS_EXIT_CRITICAL();
return (cnt);
}