Chapter 06 Event Control Blocks
6.1 Use of Event Control Blocks
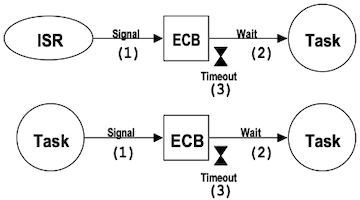
Task 및 ISR은 Event Control Block(ECB)이라는 커널 개체를 사용하여 task와 통신한다.
-
semaphore, mailbox, message queue 등 구현을 위해 사용된다.
-
ISR은 ECB 신호를 대기할 수 없다.
-
신호를 수신받을 경우, ECB를 대기 중인 task 중 가장 높은 task만 신호를 받아서 Task Ready로 전환된다.
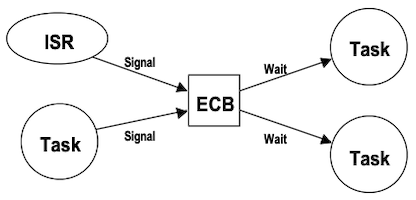
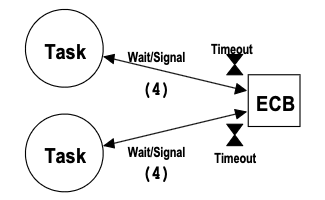
| A: ISR 혹은 task에서 ECB에 신호 전달 | B: 여러 task가 신호를 보내고, 동시에 여러 task에서 수신 | C: ECB를 semaphore로 활용 |
|---|---|---|
 |
 |
 |
6.2 Event Control Blocks
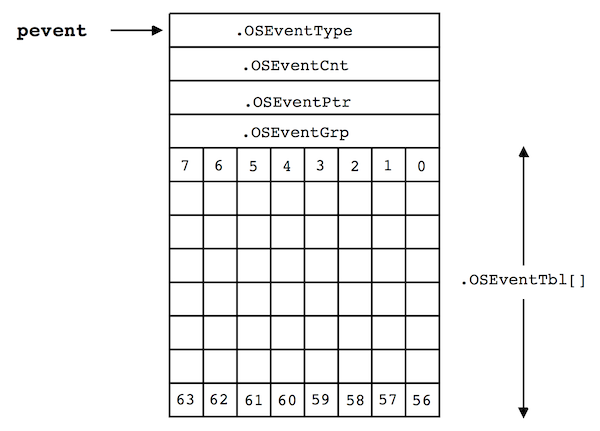
다음은 ECB 구조체를 나타낸 도식이다.
| 필드 | 설명 |
|---|---|
OSEventType |
ECB가 어떤 목적으로 사용되는지 표시 |
OSEventCnt |
semaphore 혹은 mutex 카운터 |
OSEventPtr |
mailbox 혹은 message queue 할당 시 사용 (메시지를 가리키는 포인터) |
OSEventGrp |
이벤트를 대기 중인 task 우선순위 그룹 |
OSEventTbl[OS_EVENT_TBL_SIZE] |
이벤트를 대기 중인 task 우선순위 그룹 테이블 |
OSEventGrp,OSEventTbl:OSRdyGrp,OSRdyTbl과 유사하며, (Task Ready 중인 task 대신) 이벤트를 기다리는 task를 기록하는 데 사용된다.
typedef struct {
INT8U OSEventType;
INT8U OSEventGrp;
INT16U OSEventCnt;
void *OSEventPtr;
INT8U OSEventTbl[OS_EVENT_TBL_SIZE];
} OS_EVENT;
다음은 OSEventType을 정의한 예시다.
#define OS_EVENT_TYPE_UNUSED 0 /* All possible values for OSEventType in OS_EVENT struct */
#define OS_EVENT_TYPE_MBOX 1 /* Mailbox */
#define OS_EVENT_TYPE_Q 2 /* Message queue */
#define OS_EVENT_TYPE_SEM 3 /* Semaphore */
#define OS_EVENT_TYPE_MUTEX 4 /* Mutex */
#define OS_EVENT_TYPE_FLAG 5
6.2.1 ECB Wait List
다음은 ECB의 대기 리스트를 나타낸 도식이다.
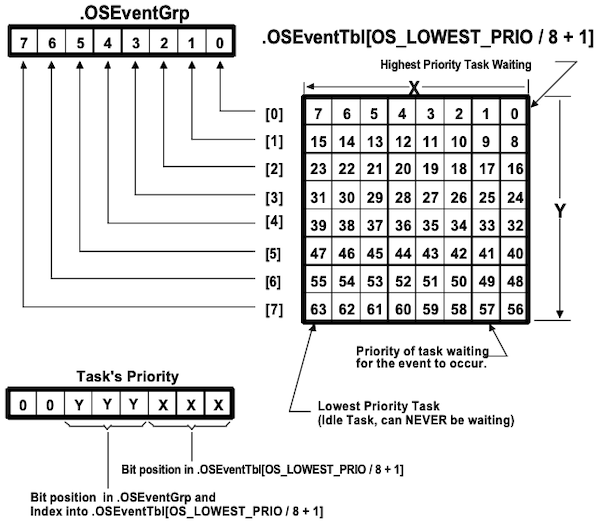
pevent->OSEventGrp |= OSMapTbl[prio >> 3];
pevent->OSEventTbl[prio >> 3] |= OSMapTbl[prio & 0x07];
| operation | 코드 | 설명 |
|---|---|---|
| Event 대기 상태로 전환 | pevent->OSEventGrp \|= OSMapTbl[prio >> 3];pevent->OSEventTbl[prio >> 3] \|= OSMapTbl[prio & 0x07]; |
OSEventGrp \|= BitYOSEventTbl[Y] \|= BitX |
| ECB Wait List에서 제거 | if ((pevent->OSEventTbl[prio >> 3] &= ~OSMapTbl[prio & 0x07]) == 0)pevent->OSEventGrp &= ~OSMapTbl[prio >> 3]; |
if((OSEventTbl[Y] &= ~BitX) == 0)OSEventGrp &= ~BitY |
| 최고 우선순위 대기 task 조회 | y = OSUnMapTbl[pevent->OSEventGrp];x = OSUnMapTbl[pevent->OSEventTbl[y]];prio = (y << 3) + x; |
y = OSEventGrp 대응x = OSEventTbl[y] 대응 |
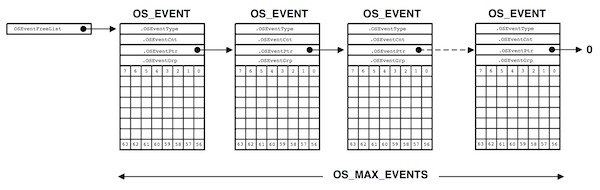
6.2.2 List of Free ECBs
ECB는 linked list 형태로 관리된다.
-
OS_MAS_EVENTS에 값을 할당하여 크기를 지정할 수 있다. -
목적(세마포어, 뮤텍스, 메일박스, 큐)에 따라
OS{...}Del()함수를 호출하여 반환한다.
6.2.3 Initializing an ECB: OS_EventWaitListInit()
ECB를 초기화하기 위해 커널에서 내부적으로 OS_EventWaitListInit() 함수를 호출한다.
ptbl:OSEventTbl의 시작 주소(첫 번째 entry)를 가리킨다.
void OS_EventWaitListInit (OS_EVENT *pevent)
{
INT8U *ptbl;
pevent->OSEventGrp = 0x00;
ptbl = &pevent->OSEventTbl[0];
#if OS_EVENT_TBL_SIZE > 0
*ptbl++ = 0x00; /* Clear the wait list table */
#endif
...
#if OS_EVENT_TBL_SIZE > 7
*ptbl++ = 0x00;
#endif
}
6.3 Making a Task Ready: OS_EventTaskRdy()
ECB가 신호를 받으면, 대기 중인 최상위 우선순위 task를 Task Ready 상태로 전환해야 한다. 이때, 커널에서 내부적으로 OS_EventTaskRdy() 함수를 사용한다.
세마포어, 뮤텍스, 메일박스, 메시지 큐의
POST함수에서 호출된다.
-
ECB wait list에서 최고 우선순위 Task를 제거한다.
-
*msg: mailbox일 경우, task에게 메세지 주소를 전달 -
msk:OSTCBStat을 수정하기 위한 bit mask -
우선순위 값을 반환한다.
INT8U OS_EventTaskRdy (OS_EVENT *pevent, void *msg, INT8U msk)
{
OS_TCB *ptcb; INT8U x; INT8U y; INT8U bitx; INT8U bity; INT8U prio;
y = OSUnMapTbl[pevent->OSEventGrp]; /* Find HPT waiting for message */
bity = OSMapTbl[y];
x = OSUnMapTbl[pevent->OSEventTbl[y]];
bitx = OSMapTbl[x];
prio = (INT8U) ((y << 3) + x);
if ((pevent->OSEventTbl[y] &= ~bitx) == 0x00) {
pevent->OSEventGrp &= ~bity;
}
ptcb = OSTCBPrioTbl[prio];
ptcb->OSTCBEventPtr = (OS_EVENT *)0;
ptcb->OSTCBMsg = msg;
ptcb->OSTCBStat &= ~msk;
if (ptcb->OSTCBStat == OS_STAT_RDY) {
OSRdyGrp |= bity;
OSRdyTbl[y] |= bitx;
}
return (prio);
}
6.4 Making a Task Wait: OS_EventTaskWait()
반대로 OS_EventTaskWait() 함수는, Task Ready 상태인 task를 중단하고 wait list에 추가한다.
세마포어, 뮤텍스, 메일박스, 메시지 큐의
PEND함수에서 호출된다.
-
OSTCBCur내OSTCBEventPtr에 ECB 주소를 전달한다. -
Ready List에서 task를 제거하고, ECB wait list에 추가한다.
void OS_EventTaskWait (OS_EVENT *pevent)
{
OSTCBCur->OSTCBEventPtr = pevent;
if ((OSRdyTbl[OSTCBCur->OSTCBY] &= ~OSTCBCur->OSTCBBitX) == 0x00) {
OSRdyGrp &= ~OSTCBCur->OSTCBBitY;
}
pevent->OSEventTbl[OSTCBCur->OSTCBY] |= OSTCBCur->OSTCBBitX;
pevent->OSEventGrp |= OSTCBCur->OSTCBBitY;
}
6.5 Task Ready Because of Timeout: OS_EventTO()
OS_EventTaskRdy()와 달리 timeout이 발생했을 경우 호출된다.
세마포어, 뮤텍스, 메일박스, 메시지 큐의
PEND함수에서, timeout 시간까지 신호를 못 받았을 경우 호출된다.
-
시간 제어 함수에 의해,
OS_EventTO()호출 시점에서는 이미 Task Ready 상태로 변경되어 있으므로 주의해야 한다. -
OSEventTbl에서 해당 task를 제거한다.
void OS_EventTO (OS_EVENT *pevent)
{
if ((pevent->OSEventTbl[OSTCBCur->OSTCBY] &= ~OSTCBCur->OSTCBBitX) == 0x00) {
pevent->OSEventGrp &= ~OSTCBCur->OSTCBBitY;
}
OSTCBCur->OSTCBStat = OS_STAT_RDY;
OSTCBCur->OSTCBStatPend = (OS_EVENT *)0;
}