Chapter 03 Kernel Structure
-
task-level scheduling:
OS_Sched() -
ISR-level scheduling:
OSIntExit()
3.6 Task Level Context Switching: OS_Sched()
task 수준에서 context switching을 수행하는 OS_Sched() 함수를 살펴보자. 다음은 OS_Sched()에서 활용되는 주요 변수와 함수이다.
| 주요 변수/함수 | 설명 | 특이사항 |
|---|---|---|
OSPrioHighRdy |
가장 높은 우선순위 | OSRdyGrp, OSRdyTbl을 활용하여 계산 |
OSTCBHighRdy |
가장 높은 우선순위 task의 TCB | OSTCBPrioTbl 통해 획득 |
OSTCBCur |
현재 실행중인 task의 TCB | |
OSIntNesting |
인터럽트 중첩 수준 | 인터럽트 시 +1 증가하며, 인터럽트 중에는 context switching이 발생하지 않음 |
OSLockNesting |
scheduler lock 중첩 수준 | 특정 함수를 임의로 호출하면 scheduler를 잠금할 수 있음(0~255) |
OSCtxSwCtr |
#context switching | 통계 목적 |
OS_TASK_SW() |
context switching 수행 | 소프트웨어 인터럽트(SWI)를 발생시키는 매크로 |
단, 다음 조건에서는 context switching이 발생하지 않는다.
-
OSIntNesting != 0: 인터럽트 실행 도중 -
ODLockNesting != 0: scheduler lock 도중 -
OSPrioHighRdy == OSPrioCur: 최고 task 우선순위 = 현재 task 우선순위
void OS_Sched(void)
{
#if OS_CRITICAL_METHOD == 3
OS_CPU_SR cpu_sr;
#endif
INT8U y;
OS_ENTER_CRITICAL();
/* if all ISRs done & not locked */
if ((OSIntNesting == 0) && (OSLockNesting == 0)) {
y = OSUnMapTbl[OSRdyGrp];
OSPrioHighRdy = (INT8U)((y << 3) + OSUnMapTbl[OSRdyTbl[y]]);
if (OSPrioHighRdy != OSPrioCur) {
OSTCBHighRdy = OSTCBPrioTbl[OSPrioHighRdy];
OSCtxSwCtr++;
OS_TASK_SW();
}
}
OS_EXIT_CRITICAL();
}
3.6.1 OS_TASK_SW()
OS_TASK_SW()는 우선순위가 낮은 task에서, 우선순위가 가장 높은 task로 전환할 때 호출되는 매크로이다. 다음 7개 레지스터를 갖는 간단한 CPU에서 과정을 살펴보자.
참고로, uC/OS-II는 인터럽트 레벨에서 context switching을 수행하도록 설계되었고, 따라서, OS_TASK_SW()를 통해 소프트웨어 인터럽트를 발생시킨다.(이후, SWI handler가 context switching을 수행한다.)
- (+) processor-dependent한 SWI 매크로로 캡슐화했기 때문에, 다양한 프로세서로 포팅이 용이하다.
다음은 OS_TASK_SW() 호출 직전, 프로세서의 변수 및 자료 구조를 나타낸 그림이다.
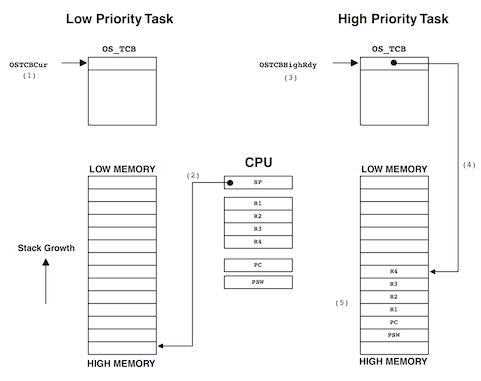
-
스택 포인터(
SP), 범용 레지스터 4개(R1,R2,R3,R4), 프로그램 카운터(PC), 프로세서 상태 워드(PSW) -
SP: 현재 CPU를 선점한 task가 가진 스택의 꼭대기를 가리킨다 -
PC,PSW: 두 레지스터 내용을 스택에서 push/pop하는 연산은, 하드웨어 수준에서 자동으로 수행된다.
다음은 context switching 과정을 나타낸 도식이다.
| 기존 task의 context를 저장 | 새롭게 선점한 task를 재개 | ||
|---|---|---|---|
 |
 |
||
| (1) | PC, PSW를 stack으로 push(hw에서 수행) |
(1) | OSTCBCur = OSTCBHighRdy,OSPrioCur = OSPrioHighRdy |
| (2) | R1, R2, R3, R4를 stack으로 push |
(2) | SP를 최고 우선순위 task의 stack pointer로 설정 |
| (3) | 현재 SP 를 OSTCBStkPtr 변수에 저장 |
(3) | 해당 stack에서 범용 레지스터 pop |
| - | (4) | 해당 stack에서 PC, PSW pop (return 시 hw에서 수행) |
다음은 SWI handler의 context switching 과정을 나타낸 의사 코드이다. CPU 레지스터를 조작할 필요가 있으므로, 실제로는 어셈블리 언어로 작성된다.
// SWI handler
void OSCtxSw(void)
{
PUSH R1, R2, R3 and R4 onto the current stack;
OSTCBCur -> OSTCBStkPtr = SP;
OSTCBCur = OSTCBHighRdy;
SP = OSTCBHighRdy -> OSTCBStkPtr;
POP R1, R2, R3 and R4 from the new stack;
Execute a return from interrupt instruction; // POP PSW, POP PC
}
- 참고로 ARM 프로세서는, 다음과 같은 방식으로 매크로를 정의하여 소프트웨어 인터럽트를 발생시킨다.
define OS_TASK_SW() asm("swi 2")
"swi 2": PUSH PC, PUSH PSW
3.7 Lock/Unlocking Scheduler: OSSchedLock(), OSSchedUnlock()
필요에 따라 현재 task가 높은 우선순위 task에 의해 선점되지 않도록, OSSchedLock(), OSSchedUnlock() 함수를 사용해 스케줄링을 잠글 수 있다.
예를 들어, 낮은 우선순위 task가, 메시지를 여러 메일 박스/큐/세마포어에 보내야 하는 경우
이때, 인터럽트는 여전히 발생하므로 주의해야 한다. 또한, 현재 task 수행을 지연시키는 시스템 호출(OSFlagPend(), OSMboxPend(), OSTimeDly() 등)은 사용하지 않아야 한다.
void OSSchedLock(void)
{
#if OS_CRITICAL_METHOD == 3
OS_CPU_SR cpu_sr;
#endif
if (OSRunning == TRUE) {
OS_ENTER_CRITICAL();
if (OSLockNesting < 255) {
OSLockNesting++;
}
OS_EXIT_CRITICAL();
}
}
void OSSchedUnlock(void)
{
#if OS_CRITICAL_METHOD == 3
OS_CPU_SR cpu_sr;
#endif
if (OSRunning == TRUE) {
OS_ENTER_CRITICAL();
if (OSLockNesting > 0) {
OSLockNesting++;
if ((OSIntNesting == 0) && (OSLockNesting == 1)) {
OS_EXIT_CRITICAL();
OS_Sched();
} else {
OS_EXIT_CRITICAL();
}
} else {
OS_EXIT_CRITICAL();
}
}
}
3.8 Idle Task: OS_TaskIdle()
어떠한 task도 Task Ready 상태가 아닐 경우, uC/OS-II에서는 Idle Task를 수행한다. 참고로, idle task는 가장 낮은 우선순위(OS_LOWEST_PRIO)를 가진다.
참고로, 무한 루프를 수행하며 OSIdleCtr 변수(32 bit counter)를 증가시키는데, 이를 기반으로 CPU 사용률(OSCPUUsage)을 측정하는 데 사용할 수 있다.
-
Idle Task에서 2초에 IdleCtr가 200 증가한다고 가정하자.
-
task A IdleCtr 200: CPU 사용률 0%
-
task B IdleCtr 100: CPU 사용률 50%
OSTaskIdleHook(): 껍데기만 있는 사용자 함수로, idle task에서 할 작업을 사용자가 정의할 수 있다.
void OS_TaskIdle(void *pdata)
{
#if OS_CRITICAL_METHOD == 3
OS_CPU_SR cpu_sr;
#endif
pdata = pdata; // Prevent compiler warning
for (;;) {
OS_ENTER_CRITICAL();
OSIdleCtr++;
OS_EXIT_CRITICAL();
OSTakeIdleHook();
}
}
3.9 Statistics Task: OS_TaskStat()
uC/OS-II에서는 OS_TaskStat()을 매초 실행하여 CPU 사용률을 측정할 수 있다.
- 활성화를 위해서는 매크로(
OS_TASK_STAT_EN=1)로 설정해야 한다.
3.9.1 Initializing Statistics Task
OSStatInit() 함수에서 Idle Task에서 카운터가 얼마나 증가하는지 측정한다.
단,
OSStart()이전, 처음으로 생성된 task에서 호출되어야 한다.(세부 설명 생략)
void main (void)
{
OSInit(); /* initialize uC/OS-II */
OSTaskCreate(TaskStart, (void *)0, TASK_STK_SIZE, 10);
OSStart(); /* start multitasking */
}
void TaskStart (void *pdata)
{
OSStatInit(); /* initialize statistics task */
for (;;) {
/* code for TaskStart */
}
}
다음은 OSStatInit() 함수이다.
void OSSStatInit(void)
{
#if OS_CRITICAL_METHOD == 3
OS_CPU_SR cpu_sr;
#endif
OSTimeDly(2); /* Synchronize with clock tick */
OS_ENTER_CRITICAL();
OSIdleCtr = 0L; /* clear idle counter */
OS_EXIT_CRITICAL();
OSTimeDly(OS_TICKS_PER_SEC);
OS_ENTER_CRITICAL();
OSIdleCtrMax = OSIdleCtr;
OSStatRdy = TRUE;
OS_EXIT_CRITICAL();
}
3.10 Interrupt Level Context Switching: OSIntExit()
inline assembly를 지원하는 C 컴파일러를 사용할 경우, C 소스 코드에서 ISR을 작성할 수 있다.
본래 uC/OS-II에서, ISR은 어셈블리로 작성해야 한다.
| 주요 함수 | 설명 | 특이사항 |
|---|---|---|
OSIntEnter() |
인터럽트 진입 시점에서 호출 | ISR에 진입 |
OSIntExit() |
인터럽트 종료 시점에서 호출 | 필요에 따라 context switching 위한 OSIntCtxSw() 호출 |
OSIntCtxSw() |
종료 시점에서 context switching | ISR 진입 과정에서 이미 push를 수행했으므로, pop만 필요. |
다음은 인터럽트 레벨에서 context switching을 수행하는 의사 코드이다.
YourISR:
Save all CPU registers;
Call OSIntEnter(); or, increment OSIIntNesting;
if (OSIntNesting == 1) {
OSTCBCur -> OSTCBStkPtr = SP;
}
Clear interrupting device;
Re-enable interrupts; (optional)
Execute user code to service ISR; (nested interrupts가 필요할 경우)
Call OSIntExit();
Restore all CPU registers;
Execute return from interrupt instruction;
다음은 인터럽트 서비스가 수행되는 과정을 나타낸 도식이다.
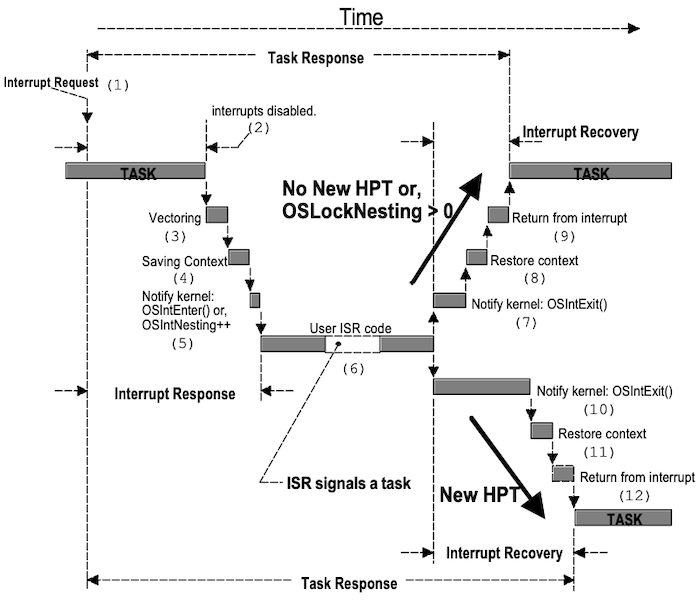
| 순서 | 설명 |
|---|---|
| (1) | 인터럽스 요청을 보냈으나, 인터럽트가 비활성화(혹은 task가 마무리되지 않아서) CPU에서 인식되지 않음 |
| (2) & (3) | CPU가 인터럽트를 인식하고, CPU 벡터가 ISR에 전달됨 |
| (4) | ISR이 CPU context를 저장한다. |
| (5) | (4)가 끝나면 OSIntEnter()(혹은 OSIntNesting++)에 알리고, 현재 task의 stack pointer를 해당 OS_TCB에 저장한다. |
| (6) | ISR 코드가 실행된다. |
| (7) | ISR이 끝나면 OSIntExit()을 호출한다. |
| (8) & (9) | CPU 레지스터가 복구되고, task로 return한다. |
| (10) | 단, ISR이 높은 순위 task를 실행하도록 설정되어 있다면, context switching이 발생한다. |
| (11), (12) | 새롭게 선점된 task의 레지스터를 복구하고, 해당 task로 return한다. |
다음은 OSIntEnter()를 정의한 코드이다.
void OSIntEnter (void)
{
if (OSRunning == TRUE) {
if (OSIntNesting < 255u) {
OSIntNesting++;
}
}
}
3.11 Tick ISR: OSTimeTick()
uC/OS-II에서는 timeout이나 timedly 등 기능이 작동하도록, clock tick을 사용한다.
-
사용 시
OSStart()이후, 반드시 clock tick interrupt 활성화 필요 -
clock tick: 초당 10~100회 정도 적절
발생 주기가 짧을수록 overhead 증가하며, 실제 빈도는 application에서 얼마 만큼의 시간 정밀도가 필요한지 여부에 따라 달라진다.
clock tick interrupt 발생 시, OSTimeTick() 함수를 호출하여 모든 task delay를 감소시킨다. 0까지 감소할 경우, 해당 task는 Task Ready 상태로 전환된다.
void OSTimeTick (void)
{
#if OS_CRITICAL_METHOD == 3
OS_CPU_SR cpu_sr;
#endif
OS_TCB *ptcb;
#if OS_TIME_GET_SET_EN > 0
OS_ENTER_CRITICAL();
OSTime++;
OS_EXIT_CRITICAL();
#endif
if (OSRunning == TRUE) {
ptcb = OSTCBList;
while (ptcb -> OSTCBPrio != OS_IDLE_PRIO) {
OS_ENTER_CRITICAL();
if (ptcb->OSTCBDlt != 0) {
if (--ptcb->OSTCBDly == 0) {
if ((ptcb->OSTCBStat & OS_STAT_SUSPEND) == 0) {
OSRdyGrp |= ptcb->OSTCBBitY;
OSRdyTbl[ptcb->OSTCBY] |= ptcb->OSTCBBitX;
} else {
ptcb->OSTCBDly = 1; // 루프를 돌며 계속 점검할 수 있도록, 1로 설정
}
}
}
ptcb = ptcb->OSTCBNext;
OS_EXIT_CRITICAL();
}
}
}
OS_STAT_SUSPEND: task가 suspend된 상태인지 여부를 나타내는 flagwhile문 내부에 추가로
OS_ENTER_CRITICAL(),EXIT_CRITICAL()를 삽입한 이유는, interrupt response를 최소화하기 위함이다.
다음은 OSTickISR의 의사 코드이다. (어셈블리 언어로 작성된다.)
void OSTickISR(void)
{
Save processor registers;
Call OSIntEnter() or increment OSIntNesting;
if (OSIntNesting == 1u) {
OSTCBCur->OSTCBStkPtr = SP;
}
Call OSTimeTick();
Clear interrupting device;
Re-enable interrupts (optional);
Call OSIntExit();
Restore processor registers;
Execute a return from interrupt instruction;
}
3.11.1 TickTask
이때 최대한 ISR을 짧게 만들기 위해서, 다음과 같은 이중 구조를 통해 task 수준에서 OSTimeTick()을 호출하도록 구성할 수 있다.
-
다른 application task보다 높은 우선순위를 가져야 한다.
-
tick 인터럽트가 발생했음을 알 수 있는 mailbox를 둔다.
void TickTask (void *pdata)
{
pdata = pdata; /* Prevent compiler warning */
for (;;) {
OSMboxPend(...); /* Wait for signal from OSTimeTick() */
OSTimeTick();
OS_Sched();
}
}
void OSTickISR(void)
{
Save processor registers;
Call OSIntEnter() or increment OSIntNesting;
if (OSIntNesting == 1u) {
OSTCBCur->OSTCBStkPtr = SP;
}
Post a 'dummy' message (e.g. (void *)1) to the tick mailbox;
Call OSIntExit();
Restore processor registers;
Execute a return from interrupt instruction;
}
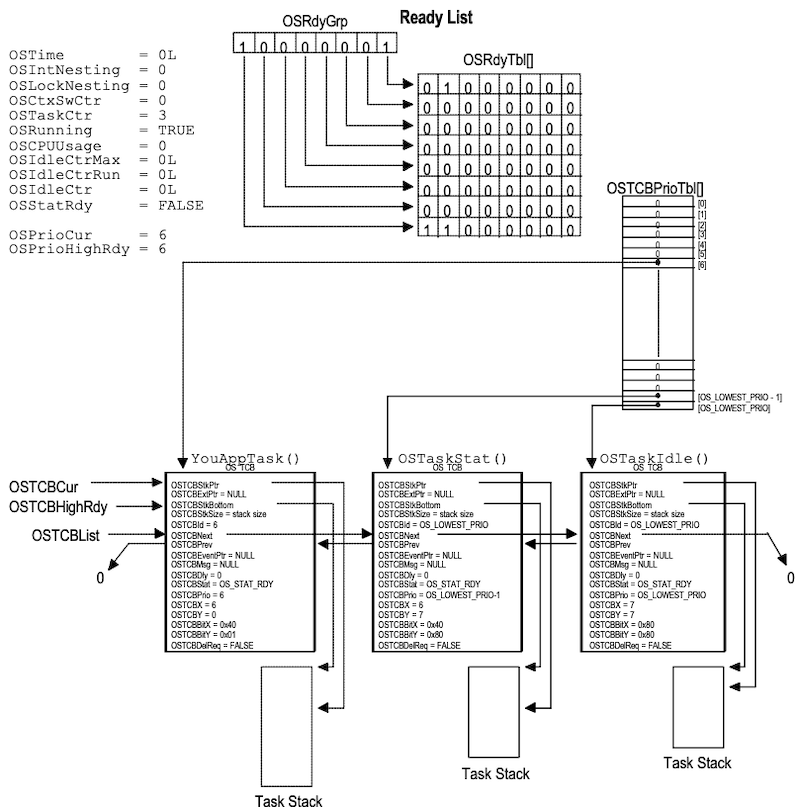
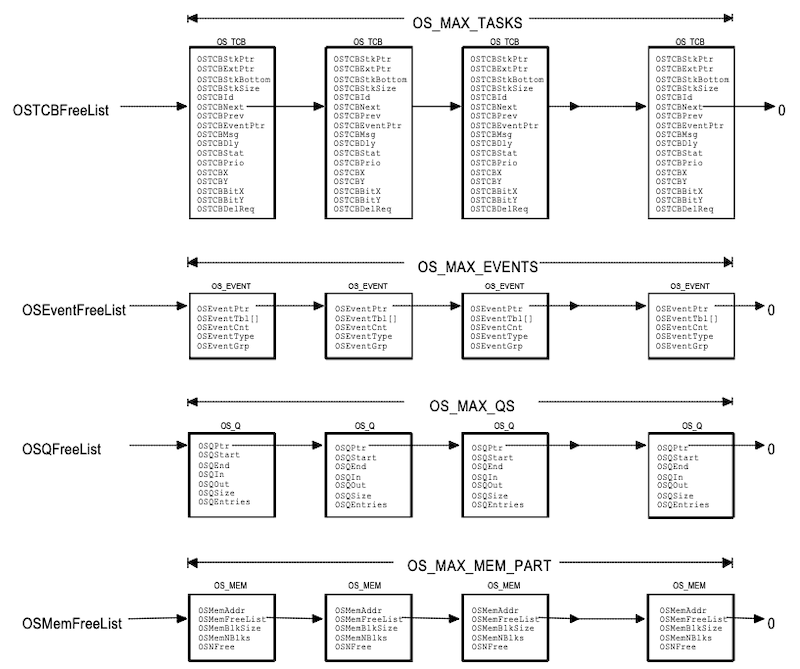
3.12 OSInit()
uC/OS-II의 multitasking을 사용하기 위해서는 OSInit()을 호출하여 초기화를 수행해야 한다. 다음은 OS_CFG.H 내 상수 설정과, 이에 대응되는 OSInit() 초기화 시 변수와 자료 구조를 나타낸 도식이다.
OS_TASK_STAT_EN = 1,OS_FLAG_EN = 1,OS_LOWEST_PRIO = 63,OS_MAX_TASKS = 62
63: idle task(lowest_prio), 62: statistics task(lowest_prio-1)
 |
 |
3.13 Starting uC/OS-II
OSStart() 이후, 무한루프를 돌며 더 이상 return하지 않는다.
void main (void)
{
OSInit();
Create at least one task using OSTaskCreate() or OSTaskCreateExt();
OSStart();
}