Chapter 03 Kernel Structure
3.1 uC/OS-II File Structure
MicroC/OS-II는 다음과 같은 file structure로 구성된다.
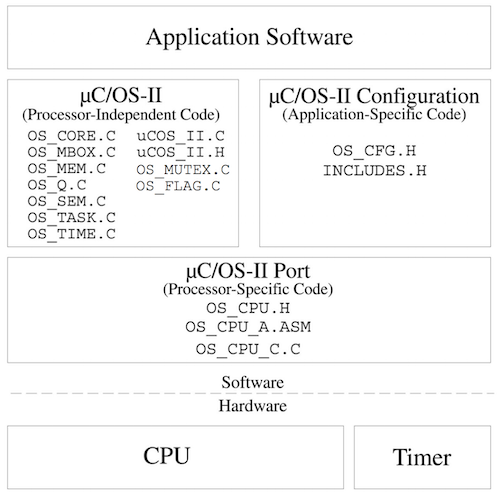
| uC/OS-II | OS 핵심 | processor-independent |
| uC-OS-II Configuration | config 헤더 파일 | application-specific |
| uC/OS-II Port | context switching 관련 | processor-specific |
가령 target CPU가 바뀔 경우, uC/OS-II Port를 수정하면 된다.
3.2 Critical Sections
MicroC/OS-II에서는 인터럽트를 활성화/비활성화할 수 있는 2가지 매크로를 제공한다. (critical sections)
-
OS_ENTER_CRITICAL() -
OS_EXIT_CRITICAL()
주의할 점으로 인터럽트가 비활성화 상태일 때, 일부 함수를 호출하면 시스템이 멈출 수 있다. 예를 들어, OSTimeDly()은 인터럽트가 비활성화 상태이므로, 타임 틱 인터럽트가 발생할 수 없어서 문제가 발생한다.
주로 지연(PEND) 관련된 함수는 모두 이런 문제를 가진다. 대부분의 uC/OS-II 서비스는 인터럽트가 활성화 상태일 때 호출해야 한다.
3.2.1 OS_CRITICAL_METHOD
critical section은 크게 세 가지 방식으로 구현할 수 있으며, 프로세서 및 컴파일러에 따라서 알맞은 방식을 선택해야 한다.(OS_CPU.H에 정의된 OS_CRITICAL_METHOD 상수에 알맞은 값을 지정하는 방식으로 선택)
| OS_CRITICAL_METHOD == 1 | OS_CRITICAL_METHOD == 2 | OS_CRITICAL_METHOD == 3 | |
|---|---|---|---|
| disable | #define OS_ENTER_CRITICAL() asm("DI") |
#define OS_ENTER_CRITICAL() asm("PUSH PSW"); asm("DI") |
#define OS_ENTER_CRITICAL()cpu_sr = get_processor_psw();disable_interrupts(); |
| enable | #define OS_EXIT_CRITICAL() asm("EI") |
#define OS_EXIT_CRITICAL() asm("POP PSW") |
#define OS_EXIT_CRITICAL() set_processor_psw(cpu_sr); |
| interrupt status | 보존 X | stack 사용하여 보존 | 지역 변수 사용하여 보존 |
asm: inline assembly로 C code에서 assembly를 삽입하는 문법에 해당된다. (c 컴파일러에 따라서 문법은 다를 수 있다.)
PSW(Processor Status Word)는 interrupt status 정보를 담으며, interrupt enable/disable, supervisor/user mode 등의 status flag를 갖는다.
asm("EI")를 할 필요가 없는 이유:asm("POP PSW")과정에서 interrupt enable bit이 복원되기 때문
3.3 Tasks = Infinite Loop
task는 기본적으로 다음과 같이 무한루프 형태로 설계한다.
void YourTask (void *pdata)
{
for (;;) {
/* USER CODE */
Call one of uC/OS-II services:
OSFlagPend();
OSMboxPend();
OSMutexPend();
OSQPend();
OSSemPend();
OSTaskDel(OS_PRIO_SELF);
OSTaskSuspend(OS_PRIO_SELF);
OSTimeDly();
OSTimeDlyHMSM();
/* USER CODE */
}
}
3.4 Task Control Block: OS_TCB
task가 생성할 때, 각 task마다 TCB(Task Control Block)가 할당된다.(OS_TCBInit()) TCB는 task의 상태를 담고 있는 OS_TCB 구조체 형태로 RAM에 reside(상주)한다.
reside: physically exist (c.f., 반례로 virtual memory는 swap되어 사라질 수 있고, 따라서 reside하지 않음)
OS_TCBInit():OSTaskCreate()나OSTaskCreateExt()함수에서 호출된다.
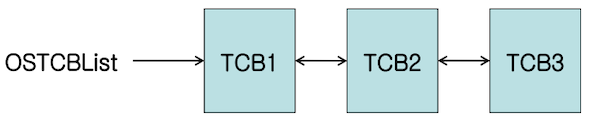
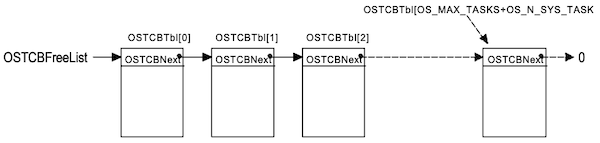
OS_TCB 구조체는 다음과 같이 doubled linked list 형태로 구현된다.
OSTCBFreeList |
 |
OSTCBList |
 |
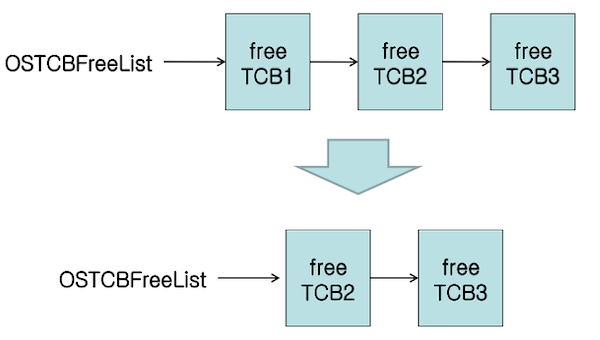
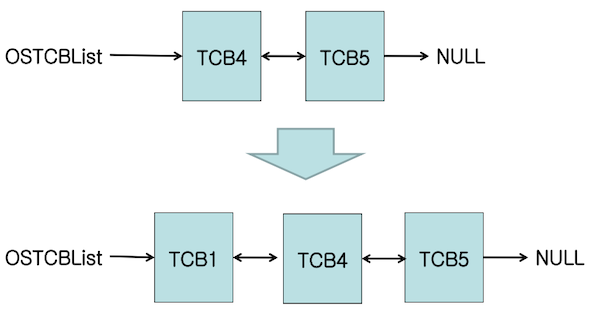
다음은 OS_TCBInit()이 호출되었을 때, doubled linked list가 변화하는 과정을 나타낸 도식이다. 예시에서는 OSTCBFreeList에서 TCB 1을 꺼내 OSTCBList에 추가한다.(task가 삭제될 경우, 다시 OSTCBFreeList에 추가된다.)
OSTCBFreeList |
 |
OSTCBList |
 |
이때, linked list는 다음과 같은 포인터를 기반으로 관리된다.
3.4.1 typedef struct os_tcb
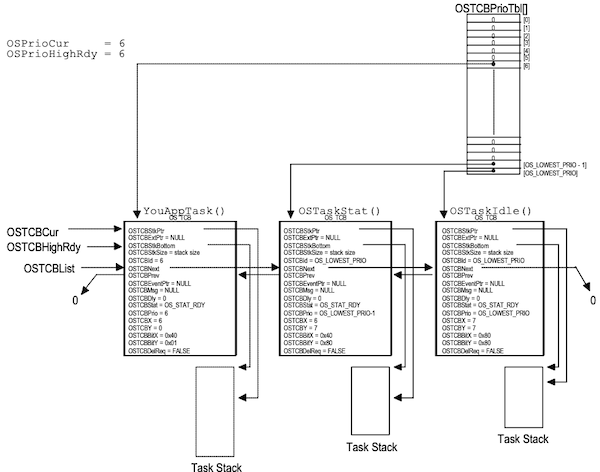
다음은 OS_TCB 구조체의 구성을 나타낸 도식이다.
-
OSTCBHighRdy: 가장 높은 우선순위 -
OSTCBCur: 현재 실행 중인 task
| 주요 변수 | 설명 | 특이사항 |
|---|---|---|
OSTCBStkPtr |
스택 꼭대기를 가리키는 포인터 | context swiching 어셈블리에서, 유일하게 접근하는 필드 |
OSTCBStat |
task 상태 | ucos.c 내 정의 |
OSTCBDly |
task delay | OSTimeDly(t)에서 t가 기록되고, 1씩 감소된다.(0이 되면 waiting에서 ready로 전환) |
OSTCBPrio |
task 우선순위 | 0(최상위)~63(최하위) |
OSTCBX, OSTCBY, OSTCBBitX, OSTCBBitY |
우선순위 관리 | 3.5절 참조 |
OSTCBNext, OSTCBPrev |
linked list | 3.4절 참조 |
OSTCBEventPtr |
ECB(Event Control Block)를 가리키는 포인터 |
다음은 OS_TCB 구조체를 정의한 코드이다.
unsigned int8로 정의된 state에 주목하자.
typedef struct os_tcb {
OS_STK *OSTCBStkPtr; /* Pointer to current top of stack */
// EXT: 확장 기능(extension)을 의미하며, 반드시 존재할 필요는 없다.
#if OS_TASK_CREATE_EXT_EN > 0
void *OSTCBExtPtr; /* Pointer to user definable data for TCB extension*/
OS_STK *OSTCBStkBottom; /* Pointer to bottom of stack */
INT32U OSTCBStkSize; /* Size of stack (in number of stack elements) */
INT16U OSTCBOpt; /* Task options */
INT16U OSTCBId; /* Task ID (0..65535) */
#endif
struct os_tcb *OSTCBNext; /* Pointer to next TCB in the TCB list */
struct os_tcb *OSTCBPrev; /* Pointer to previous TCB in the TCB list */
#if ((OS_Q_EN > 0) && (OS_MAX_QS > 0)) || (OS_MBOX_EN > 0) || (OS_SEM_EN > 0) || (OS_MUTEX_EN > 0)
OS_EVENT *OSTCBEventPtr; /* Pointer to event control block */
#endif
#if ((OS_Q_EN > 0) && (OS_MAX_QS > 0)) || (OS_MBOX_EN > 0)
void *OSTCBMsg; /* Message received from OSMboxPost() or OSQPend() */
#endif
#if (OS_VERSION >= 251) && (OS_FLAG_EN > 0) && (OS_MAX_FLAGS > 0)
#if OS_TASK_DEL_EN > 0
OS_FLAG_NODE *OSTCBFlagNode; /* Pointer to event flag node */
#endif
OS_FLAGS OSTCBFlagsRdy; /* Event flags that made task ready */
#endif
INT16U OSTCBDly; /* Nbr ticks to delay task */
INT8U OSTCBStat; /* Task status */
INT8U OSTCBPrio; /* Task priority */
INT8U OSTCBX; /* Bit position in group */
INT8U OSTCBY; /* Index into ready table */
INT8U OSTCBBitX; /* Bit mask position in group */
INT8U OSTCBBitY; /* Bit mask position in ready table */
#if OS_TASK_DEL_EN > 0
BOOLEAN OSTCBDelReq; /* Indicates whether a task needs to delete itself */
#endif
} OS_TCB;
3.4.2 OS_TCBInit()
OS_TCB를 생성하는 OS_TCBInit() 초기화 함수는, 다음과 같은 7개 인자를 필요로 한다.
| 인자 | 설명 | 저장되는 필드 |
|---|---|---|
| INT8U prio | task 우선순위 | OSTCBPrio |
| OS_STK *ptos | task stack의 top을 가리키는 포인터 | OSTCBStkPtr |
| OS_STK *pbos | task stack의 bottom을 가리키는 포인터 | OSTCBStkBottom |
| INT16U id | task id | OSTCBId |
| INT32U stk_size | task stack 크기 | OSTCBStkSize |
| void *pext | 사용자 정의 TCB(확장)을 가리키는 포인터 | OSTCBExtPtr |
| INT16U opt | task 옵션 | OSTCBOpt |
3.4.3 OSTCBStat
다음은 OSTCBStat가 나타내는 task status를 정리한 도표이다.
| bits | status | description |
|---|---|---|
| 0x00 | OS_STAT_RDY |
Task Ready |
| 0x01 | OS_STAT_SEM |
Pending on semaphore |
| 0x02 | OS_STAT_MBOX |
Pending on mailbox |
| 0x04 | OS_STAT_Q |
Pending on queue |
| 0x08 | OS_STAT_SUSPEND |
Task is suspended |
| 0x10 | OS_STAT_MUTEX |
Pending on mutual exclusion semaphore |
| 0x20 | OS_STAT_FLAG |
Pending on event flag group |
| 0x3E | OS_STAT_PEND_ANY |
(OS_STAT_SEM | OS_STAT_MBOX| OS_STAT_Q | OS_STAT_MUTEX | OS_STAT_FLAG) |
3.5 Ready List
uC/OS-II에서는 현재 Task Ready인 task를 Ready List에 기록하여 관리한다. Ready List는 두 가지 자료구조를 기반으로 한다.
-
INT8U OSRdyGrp: 한 그룹이 8개 우선순위 task에 대응되며, 그룹에서 적어도 하나의 Task Ready가 있다면 flag가 켜진다. -
INT8U OSRdyTbl[8]: 각 task가 Task Ready인지 표시
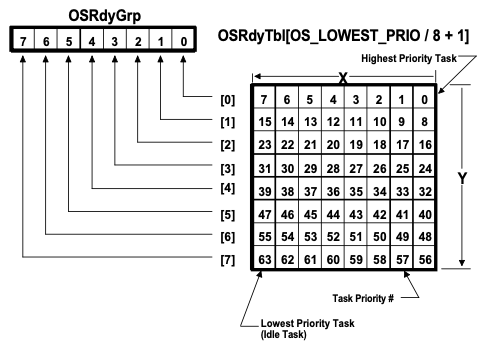
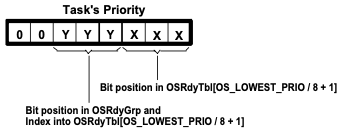
우선순위는 6bits로 표현하는데, 상위 3bit는 OSRdyGrp, 하위 3bit는 OSRdyTbl을 조회하기 위해 사용한다.
상위 3비트(Y):
prio >> 3, 하위 3비트(X):prio & 0x07로 획득 (0x07 = 0000 0111)
3.5.1 OSMapTbl[]
Ready List를 조작하는 과정을 살펴보자. 이때, 우선순위 각 3 bit마다, OSMapTbl[]에서 대응되는 bitmask 값을 가져온다.
| Index | Bit mask(binary) |
|---|---|
| 0 | 0000 0001 |
| 1 | 0000 0010 |
| 2 | 0000 0100 |
| 3 | 0000 1000 |
| 4 | 0001 0000 |
| 5 | 0010 0000 |
| 6 | 0100 0000 |
| 7 | 1000 0000 |
예를 들어. Priority 0001 1010(=26)인 task가 있다면, bitmask 값은 다음과 같다.
| Y ( OSRdyGrp) |
X ( OSRdyTbl[Y]) |
|
|---|---|---|
0001 1010 |
011(=3) |
010(=2) |
OSMapTbl[] |
BitY: 0000 1000 |
BitX: 0000 0100 |
3.5.2 Operations on Ready List
다음은 이를 기반으로 Ready List를 조작하는 예시다.
|=: bitwise OR 결과를 할당제거 시 주의사항으로,
OSRdyTbl행의 값(그룹)이 모두 0이 됐을 때,OSRdyGrpflag를 끈다.
| operation | 코드 | 설명 |
|---|---|---|
| Task Ready 상태로 전환 | OSRdyGrp \|= OSMapTbl[prio >> 3];OSRdyTbl[prio >> 3] \|= OSMapTbl[prio & 0x07]; |
OSRdyGrp \|= BitYOSRdyTbl[Y] \|= BitX |
| Ready List에서 제거 | if ((OSRdyTbl[prio >> 3] &= ~OSMapTbl[prio & 0x07]) == 0)OSRdyGrp &= ~OSMapTbl[prio >> 3]; |
if((OSRdyTbl[Y] &= ~BitX) == 0)OSRdyGrp &= ~BitY |
또한, 후술할 OSUnMapTbl을 활용해, 최고 우선순위 task를 빠르게 조회할 수 있다.
| operation | 코드 | 설명 |
|---|---|---|
| 최고 우선순위 task 조회 | y = OSUnMapTbl[OSRdyGrp];x = OSUnMapTbl[OSRdyTbl[y]];prio = (y << 3) + x; |
y = OSRdyGrp 대응x = OSRdyTbl[y] 대응 |
3.5.3 Finding the Highest Priority Task: OSUnMapTbl[]
(context switching 시) 가장 높은 우선순위 task를 찾을 때는, OSUnMapTbl을 활용하여 빠르게 조회한다.
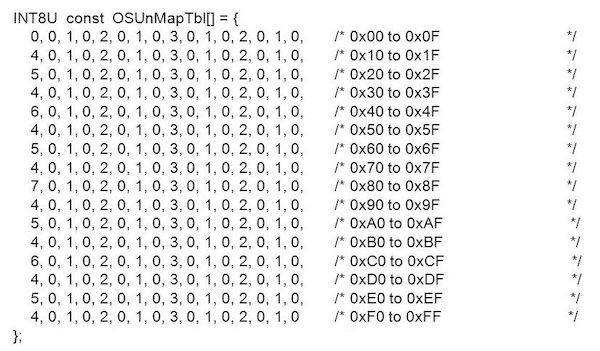
다음은 OSRdyGrp가 현재 0110 1000(=0x68) 때, 최고 우선순위 task를 찾는 예시다.
y = OSUnMapTbl[0x68] = 3
x = OSUnMapTbl[0xE4] = 2
prio = (y << 3) + x = (3 << 3) + 2 = 26