Chapter 02 Real-time Systems Concepts
컴퓨터 시스템은 software와 hardware로 나뉘며, software는 application software(응용 소프트웨어)와 system software(시스템 소프트웨어)로 나뉜다.
OS가 대표적인 시스템 소프트웨어이나, OS에서도 상시적으로 메모리에 적재된 소프트웨어를 주로 시스템 소프트웨어로 지칭한다.
다음은 배경지식 용도로, 자주 쓰이는 용어를 정리한 도표이다.
| 용어 | 설명 | 기타 |
|---|---|---|
| Critical Section | interrupt가 발생하지 않아야 한다. | - 적절한 제어가 없으면, 중대한 문제가 발생할 수 있다. (e.g., data integrity broken, race condition) - all-or-nothing 스타일로 실행 필요 |
| Resources | processor, memory, devices, variables, program | |
| Shared Resources | 둘 이상의 task가 공유하는 자원 | |
| Multitasking | 여러 task가 CPU를 전환하며 사용하는 방식으로 처리 | |
| Task | 자기자신이 CPU를 독점하고 있다고 생각하는 프로그램 | thread와 동일 |
race condition: 여러 입력 또는 실행 순서에 따라 결과가 바뀌는 상태를 의미한다.
2.1 Background/Foreground Systems
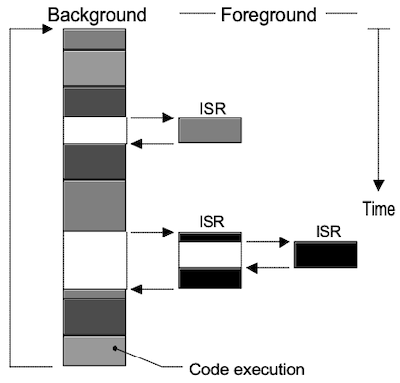
다음과 같이 foreground/background로 나뉜 단순한 시스템을 살펴보자. 하나의 반복문(loop) 안에서 여러 작업을 수행하는 이러한 구조를 super-loop라고 지칭한다.
block: function or code block
ISR(Interrupt Service Routine): 인터럽트가 발생했을 때 처리하는 함수(루틴)
| 용어 | 설명 | 동작 예시 |
|---|---|---|
| background (task level) |
while loop처럼 항상 반복되어 실행된다. | LED 버튼이 눌렸는지 체크 |
| foreground (interrupt level) |
ISR에 따라 interrupt를 처리한다. | 버튼이 눌렸을 때, LED on |
간단한 임베디드 시스템(전자레인지, 장난감 등)에서 볼 수 있는 이러한 구현은, 저렴하지만 non-deterministic하다는 한계점을 갖는다.
non-deterministic: 인터럽트가 asynchronous하게 실행되므로, deadline을 보장할 수 없다. (e.g., 버튼을 계속 누르고 있으면, LED가 계속 켜지고 delay 발생)
2.2 Context Switches
멀티태스킹 커널이 현재 CPU를 선점한 task에서, 현재 task를 보존하고 다른 task로 전환하는 과정을 context switching(문맥 전환)이라고 지칭한다.
-
current task: context(CPU register set)를 stack에 저장한다.
-
new task: context를 CPU register에 복구한 뒤 코드를 실행한다.
이 과정이 overhead에 해당되며, register 수가 많을수록 overhead는 커진다.
이때, 각 task는 자신만의 stack과 Task Control Block(TCB)라는 구조체를 가지며, TCB를 바탕으로 context를 저장한다.
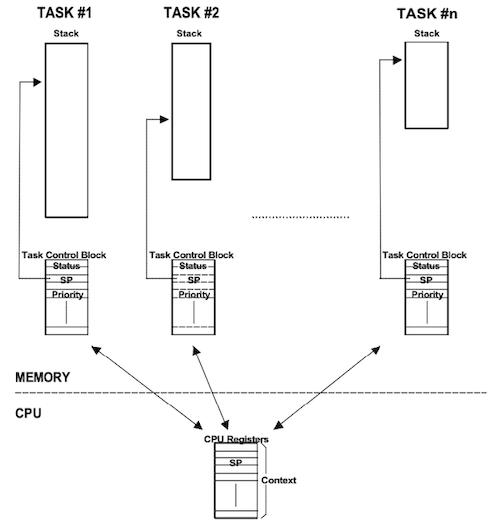
status(task 상태 정보), stack pointer, priority, CPU register 등
2.3 Task States
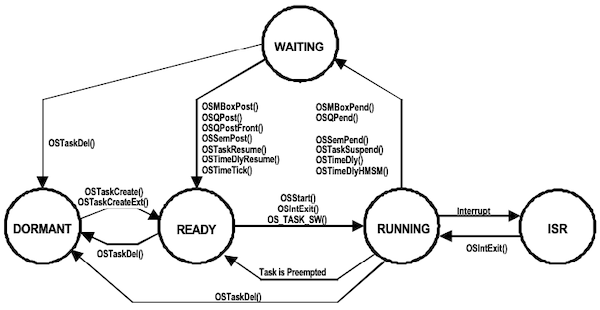
다음은 OS에서 task가 가질 수 있는 다섯 개 상태를 나타낸 도표이다.
| 상태 | 설명 | 함수 예시 |
|---|---|---|
| Task Dormant | (수면 상태) 코드가 메모리에 있으나, 아직 멀티태스킹 커널에 등록되지 않음 | OSTaskDel() |
| Task Ready | (준비 상태) 언제든지 실행이 가능하도록 준비된 상태이나, 우선순위가 더 높은 다른 task가 동작 중 | OSTaskCreate(), OSTaskCreateExt(), OSMBoxPost(), OSTaskResume() ... |
| Task Running | (실행 상태) CPU를 점유하고 실행 중인 상태 | OSStart(), OS_TASK_SW(), OSIntExit() |
| Task Waiting | (대기 상태) I/O 처리, 공유자원 잠금, 타이머 등을 기다리는 상태 | OSTimeDly(), OSMBoxPend(), ... |
| ISR Running | ISR을 수행 중인 상태 |
2.4 Kernels
kernel(커널)이란 멀티태스킹 시스템의 핵심으로, task 관리 및 task 사이의 통신을 책임지며, context switching을 수행한다.
| 장/단점 | 요소 | 설명 |
|---|---|---|
| (+) | 시스템 디자인을 단순화 | task를 분리하여, application을 단순화한다. |
| (-) | ROM 사용량 | 커널 코드가 차지하는 메모리 |
| (-) | RAM 사용량 | 커널의 데이터 구조체가 차지하는 메모리 |
| (-) | CPU time | 대체로 2~5%의 CPU 시간을 소비한다. |
특히 task마다 각자 stack을 차지하면서, RAM 사용량이 크게 증가한다.
근래 OS에서는, 커널이 file system, network protocol 등 다양한 기능을 포괄한다.
2.5 Schedulers
scheduler(=dispatcher)는 커널의 일부분으로, 다음에 실행할 task를 결정한다.
- real-time kernel: 주로 우선순위 기반 스케줄링을 사용한다.
deadline: 특정 프로세스가 반드시 끝나야 하는 기한을 의미한다.
- Round-Robin Scheduling
둘 이상의 같은 우선순위 task가 있을 때, 동일한 시각 조각(quantum, time slice) 동안 공평하게 실행하는 스케줄링 정책이다.
MicroC/OS-II의 각 task는 고유한 우선순위를 가져야 하므로, Round-Robin Scheduling을 지원하지 않는다.
2.5.1 Non-Preemptive vs Preemptive Kernels
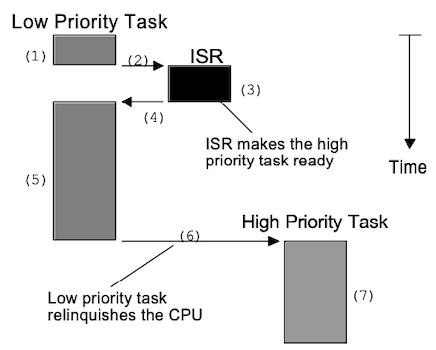
우선순위 기반 스케줄링은 CPU 자원의 선점 방식(스케줄링)에 따라서, non-preemptive(=cooperative multitasking, 비선점형)과 preemptive(선점형) 두 커널로 분류할 수 있다.
비선점형: task 스스로 제어권을 넘기기 전까지 선점. Windows 3.1, MS-DOS 등이 대표적. e.g.,
while(msg=GetMessage(&msg, NULL, 0, 0)) { DispatchMessage(&msg); }
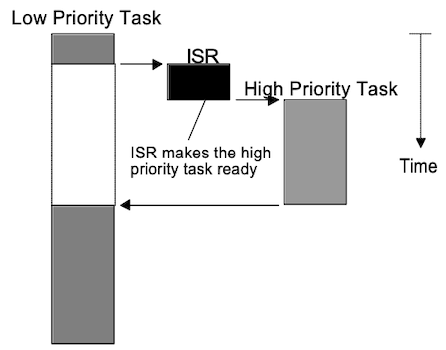
| Non-Preemptive(비선점형) | Preemptive(선점형) | |
|---|---|---|
 |
 |
|
| 저-우선순위 task 마무리 후, 비로소 context switching 발생 |
ISR 직후 context switching 발생 |
다음은 두 종류의 커널의 장단점을 나타낸 도표이다.
| Non-Preemptive | Preemptive | |
|---|---|---|
| (+) | - 짧은 inturrupt latency - non reentrant function 사용 가능 - 데이터 손상에서 안전(세마포어 등 필요 감소) |
- deterministic |
| (-) | - responsiveness(응답성) | - 세마포어 등 프로그래밍 노력 필요 |
2.5.1.1 Reentrant vs Non-Reentrant Functions
특정 함수를 사용할 때 데이터의 손상 가능성(reentrancy)에 따라서, 함수를 reentrant와 non-reentrant 두 가지로 분류할 수 있다.
| reentrant(재진입 가능) | non-reentrant(비재진입) | |
|---|---|---|
| e.g. | void strcpy(char *dest, char *src){while (*dest++ = *src++) {;}*dest = NUL; } |
int Temp; // 정수형 전역변수void swap(int *x, int *y){ Temp = *x;*x = *y;*y = Temp;} |
| 복사본이 각 task stack에 위치하므로, 인자가 손상되지 않는다. | 인자가 전역 변수를 바꾸면서, 다른 task에서 문제가 발생할 수 있다. |
2.5.2 Rate Monotonic Scheduling(RMS)
RMS(Rate Monotonic Scheduling)은, task의 rate(단위 시간당 수행 횟수, short period)를 기반으로, 우선순위를 배정하는 스케줄링 기법이다.
다음은 RMS에서 시스템에 두는 세 가지 가정이다.
-
(1) 모든 task는 단일 CPU에서, 규칙적인 주기를 갖는다.(periodic)
-
(2) task가 서로 동기화하지 않고, 자원을 공유하지 않으며, 데이터를 주고 받지 않는다. (세마포어 등을 사용하지 않음)
-
(3) 항상 Task Ready 상태의 최상위 우선순위 task가 실행된다. (preemptive)
참고로 RMS는 다음 식이 만족할 때, hard real-time system을 보장한다.
-
: task i 최대 실행 시간
-
: task i 실행 주기
-
: CPU Utilization(모든 task의 CPU 사용률: 개별 실행 시간/주기의 총합)
-
: task 수
hard real-time system: deadline miss를 용인하지 않는 시스템을 의미한다. (c.f., soft real-time system: deadline을 지나도 유효성을 잠시 유지한다. 시간의 경과에 따라, 해당 유효성은 감소한다.)