19 Efficient Video Understanding and Generative Models
Lecture 19 - Efficient Video Understanding and Generative Models | MIT 6.S965
EfficientML.ai Lecture 15 - GAN, Video, and Point Cloud (MIT 6.5940, Fall 2023, Zoom)
EfficientML.ai Lecture 17 - GAN, Video, Point Cloud (Zoom Recording) (MIT 6.5940, Fall 2024)
Video understanding은 다양한 도메인에서 활용될 수 있다.
- action/gesture recognition, scene understanding, video search for ads, video prediction for autonomous driving, ...
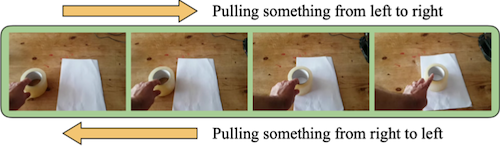
이때, 동영상은 이미지와 달리 temporal dimension(시간 차원)을 고려해야 한다.
19.1 2D CNNs for Video Understanding
Temporal Segment Networks: Towards Good Practices for Deep Action Recognition 논문(2016)
Two-Stream Convolutional Networks for Action Recognition in Videos 논문(2014)
Long-term Recurrent Convolutional Networks for Visual Recognition and Description 논문(2014)
연구 초기 2D CNN을 활용하여, 각 동영상 프레임을 샘플링한 뒤 이미지처럼 처리하는 방법이 제안되었다.
-
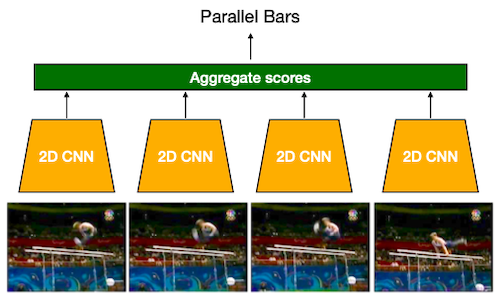
TSN(Temporal Segment Networks)
-
: 비디오에서 개 프레임 샘플링 후, 각자 class score 계산 (Aggregation: average, max 등)
-
단점: 낮은 정확도
-
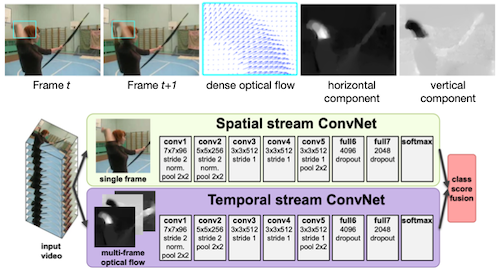
Two-stream ConvNet
-
Spatial stream(물체 인식) + Temporal stream(optical flow 인식)
-
단점: optical flow 연산 속도 (모델 추론보다도 긴 지연시간 소요)
-
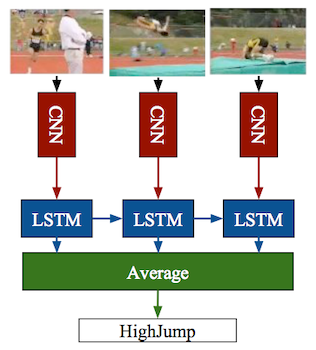
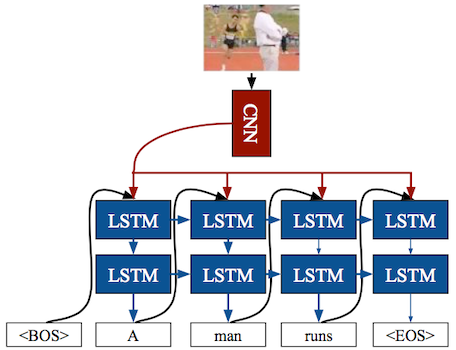
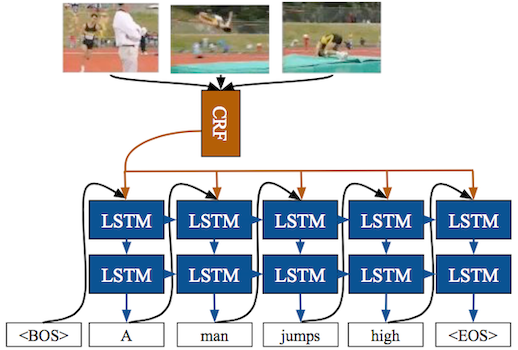
LRCNs (Long-term Recurrent Convolutional Networks)
-
2D CNN + Post-fusion(e.g., LSTM)
-
단점: low-level temporal relationship을 제대로 모델링하지 못한다.
low-level 특징은 CNN에서 추출되며, LSTM은 high-level 특징을 모델링한다.
| Action Recognition | Image Captioning | Video Description |
|---|---|---|
 |
 |
 |
19.2 3D CNNs for Video Understanding
Learning Spatiotemporal Features with 3D Convolutional Networks 논문(2014)
Quo Vadis, Action Recognition? A New Model and the Kinetics Dataset 논문(2017)
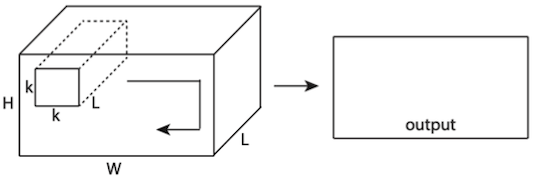
다음은 (spatial dimension뿐만 아니라) temporal dimension를 함께 연산하는 C3D(Convolutional 3D)이다. (spatiotemporal information)
| 2D conv on multiple frames | 3D conv |
|---|---|
 |
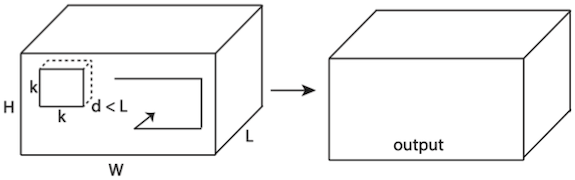 |
: 프레임 수, : kernel temporal depth
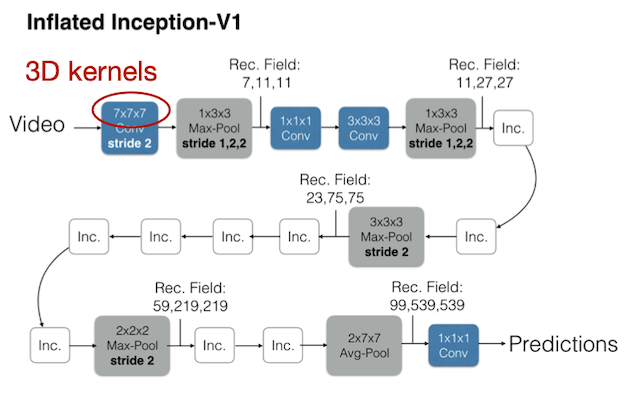
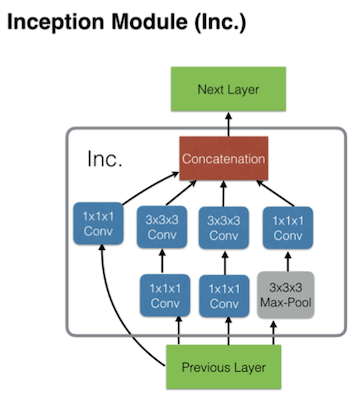
그러나, 3D CNN은 보다 많은 파라미터를 갖는다.(연산 비용도 증가) I3D에서는 3D CNN을, 기존 2D CNN 가중치를 활용하여 초기화하는 방법을 제안했다. (e.g., ImageNet 사전학습 2D CNN)
- 초기화 시, temporal dimension에 가중치 복제
| Inflated Inception-V1 | Inception Module |
|---|---|
 |
 |
19.3 Temporal Shift Module (TSM)
TSM: Temporal Shift Module for Efficient Video Understanding 논문(2018): I3D family에 비해 6x 적은 연산량
위 논문에서는 3D conv의 성능은 유지하되 연산 비용을 줄일 수 있는, TSM(Temporal Shift Module)을 제안하였다.
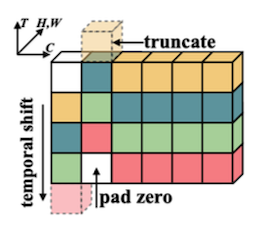
여러 frame 사이 정보를 교환하기 위해, temporal dimension 차원에서 shift를 수행한다.
-
Bi-directional: 인접 시간의 frame끼리 정보 교환
-
Uni-directional: 과거에서 미래로 정보 교환
실시간 스트리밍 task: 미래 시점의 frame을 가져올 수 없으므로 한 가지 방식으로만 shift
| Original tensor w/o shift |
Offline temporal shift (bi-direction) |
Online temporal shift (uni-direction) |
|---|---|---|
 |
 |
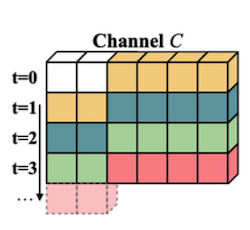 |
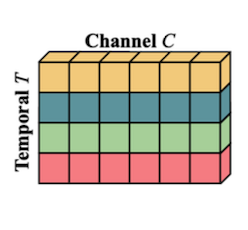
공간 차원(H, W)을 하나로 합쳐서, T / H,W / C 3차원으로 표현
spatial information을 유지하기 위해 1개 채널만 shift한다. (spatial, temporal information 간의 trade-off)
이처럼 shift 연산을 추가하는 것만으로, 보다 효율적으로 temporal modeling이 가능하다.
19.3.1 Inserting TSM into 2D CNNs
여러 프레임을 대상으로 2D Conv를 적용하면 Timestamp가 생기며, 해당 차원에서 shift를 수행하는 방식으로 적용할 수 있다.
- Offline TSM models (단일 배치 단위 수행)
bypass를 추가하여 information loss를 보전한다.

- Online TSM models (Frame-by-frame 수행)
미래인 에 접근할 수 없으므로, 메모리에 캐싱한 과거 frame 정보를 사용한다.

다음은 TSM을 구현한 코드 예시다.
# shape of x: [N, T, C, H, W]
out = torch.zeros_like(x)
fold = c // fold_div
out[:, :-1, :fold] = x[:, 1:, :fold] # shift left
out[:, 1:, fold: 2 * fold] = x[:, :-1, fold: 2 * fold] # shift right
out[:, :, 2 * fold:] = x[:, :, 2 * fold:] # not shift
return out
19.4 Other Efficient Methods for Video Understanding
이외에도 video understanding을 위한 효율적인 방법이 다방면에서 연구되고 있다.
19.4.1 Kernel Decomposition
A Closer Look at Spatiotemporal Convolutions for Action Recognition 논문(2017)
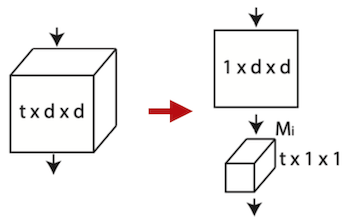
Conv3D를 2D spatial + 1D temporal kernel로 행렬을 분해할 수 있다. (보다 모델 크기가 가벼워지며 학습에 유리하다.)
19.4.2 Multi-Scale Modeling
위 논문에서는 효율적인 video recognition을 위한 두 가지 분기(slow, fast) 설계를 제안하였다.
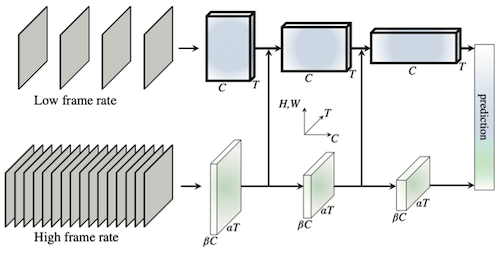
- Slow pathway(연산의 80%)
낮은 프레임 속도에서 공간 정보에 집중 (large spatial, small temporal)
- Fast pathway(연산의 20%)
높은 프레임 속도에서 빠르게 변하는 motion에 집중 (small spatial, large temporal)
Fast pathway: 프레임 샘플링 ( 논문 ), Slow pathway: Fast 대비 비율 채널 샘플링 ( )
19.4.3 Neural Architecture Search for Video Understanding
X3D: Expanding Architectures for Efficient Video Recognition 논문(2020)
X3D 논문은 탐색 공간으로 temporal duration, frame rate, spatial resoultion을 포함하는 NAS를 제안하였다.
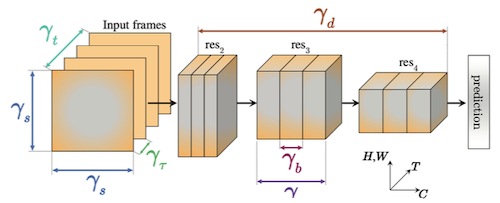
-
temporal duration
-
frame rate
-
spatial resoultion
-
width
-
bottleneck width
-
depth
19.4.4 Skipping Redundant Frames/Clips
SCSampler: Sampling Salient Clips from Video for Efficient Action Recognition 논문(2019)
긴 동영상에서 중요한 정보를 포함하는 일부 프레임만을 식별하면 연산을 크게 줄일 수 있다.
위 논문에서는 SCSampler(Salient Clip Sampler) 설계를 통해, non-salient 파트를 구분하고 제거함으로써 연산을 효과적으로 줄였다.
-
입력
-
압축 비디오 데이터(I-frame, Motion Displacement, RGB-Residual) (ResNet-18 처리)
-
MEL-spectrogram 변환 오디오 데이터 (VGG 모델 처리)
-
Top-K 선별: 비디오 Top-K' 프레임 + 비디오 Top-K'와 중복되지 않는 오디오 Top-K'' 프레임
| Dense prediction | SCSampler |
|---|---|
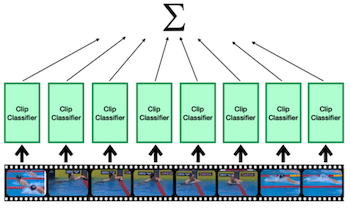 |
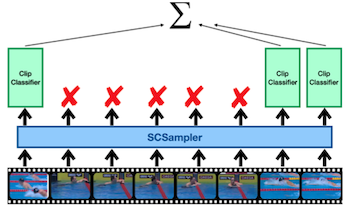 |
saliency ranking: Action Classifier의 Top-K 프레임 분류 손실을 줄이도록 학습
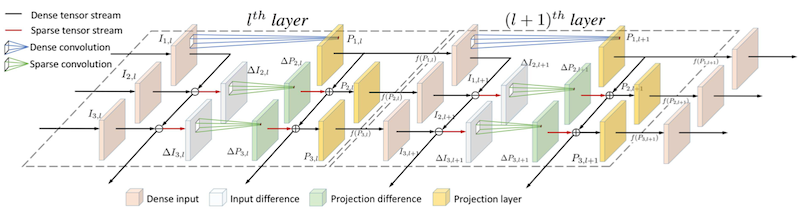
19.4.5 Utilizing Spatial Redundancy
Recurrent Residual Module for Fast Inference in Videos 논문(2018)
인접 frame( , )은 spatial information이 거의 동일한 경우가 많다. 따라서, 이러한 특성을 활용하여 중복 계산을 줄인 RRM(Recurrent Residual Module) 설계가 제안되었다.
(1) Convolution, Fully-Connected 연산의 선형성(linearity)을 활용하여, 프레임 사이 변화( )만을 계산한다.
- 현재 feature map은 스냅샷으로 저장, 이후 다음 프레임의 feature map과 연산
: 희소 행렬 특성을 가지므로, EIE 등 가속기를 사용해 효율적으로 연산 가능
(2) 해당 연산 결과를 이어지는 non-linearity(Pooling, ReLU 등) 레이어에 통과시킨다.
다음은 RRM을 적용한 연산 절차를 보여준다.