18 Efficient Point Cloud Recognition
Lecture 18 - Efficient Point Cloud Recognition | MIT 6.S965
EfficientML.ai Lecture 17 - GAN, Video, Point Cloud (Zoom Recording) (MIT 6.5940, Fall 2024)
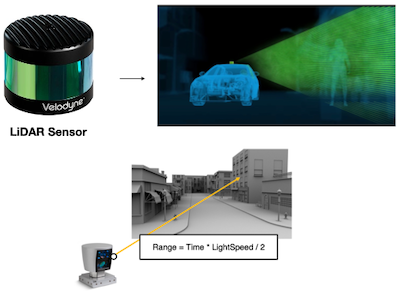
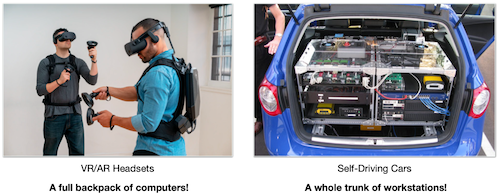
VR 헤드셋, 자율주행 자동차, 스마트폰, 드론 등 3D 센서는 다양한 도메인에서 널리 활용되고 있다.
| Applications | LiDAR |
|---|---|
 |
 |
18.1 Data: 3D Point Clouds
point cloud는 3차원 좌표 정보를 갖는 벡터 와, 해당 point의 feature인 차원 특징 벡터 ( ) 가 결합된 집합이다.
feature 예시: 신경망 모델(e.g., PointNet)에서 얻은 embedding
18.1.1 Applications
3D Semantic Parsing of Large-Scale Indoor Spaces 논문(2016)
RandLA-Net: Efficient Semantic Segmentation of Large-Scale Point Clouds 논문(2019)
- Augmented Reality(AR)
- Autonomous Driving
- High-Energy Particle Physics
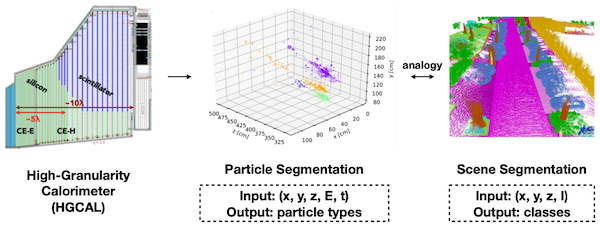
18.1.2 Challenges
SemanticKITTI: A Dataset for Semantic Scene Understanding of LiDAR Sequences 논문(2019)
point cloud 데이터가 갖는 특성에 따라, image 데이터에 보편적으로 쓰이는 방법을 바로 적용하기 어렵다.
| Images | Point clouds |
|---|---|
 |
 |
| Dense 규칙적인 메모리 접근 |
Extremely Sparse(경우에 따라 \<0.1% 밀도) 불규칙한 메모리 저장 |
| 보편적인 CNN 모델 활용 가능 | 전용 연산 및 시스템 필요 |
또한, task 특성상 가용한 연산 자원이 한정될 수 있다.
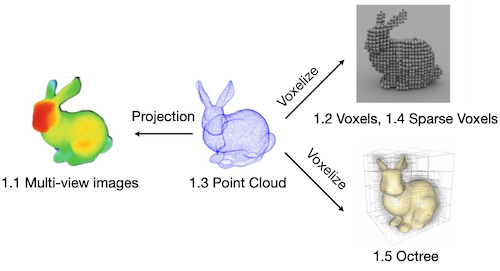
18.1.3 Representing 3D Data
3D 데이터를 표현하는 방법은 다양하게 존재한다.
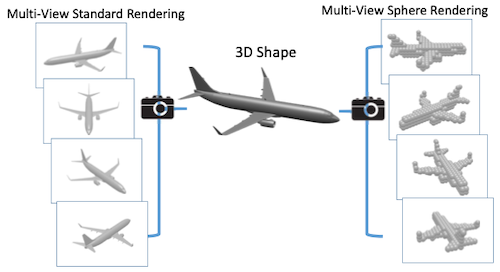
18.2 Multi-View Images
Volumetric and Multi-View CNNs for Object Classification on 3D Data 논문(2016)
다양한 시점에서 point cloud를 rendering하여 multi-view 이미지를 생성할 수 있다.
- rendering한 각 이미지에 2D CNN을 적용한 뒤, 평균 혹은 최대 풀링으로 결과를 통합한다.
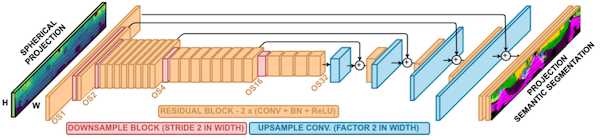
18.2.1 Range Images
RangeNet++: Fast and Accurate LiDAR Semantic Segmentation 논문(2019)
RangeNet++에서는 LiDAR 센서에서 획득한 360도( ) 포인트 클라우드에, spherical projection를 수행하여 2D 이미지로 변환하여 처리하는 방법을 제안하였다.
| Point Cloud | Spherical Projection |
|---|---|
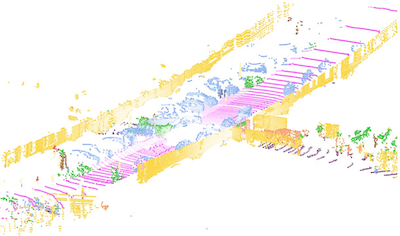 |
 |
: LiDAR 센서 수직 시야각(field of view)의 upper/lower bound
이후 투영 이미지를 대상으로 U-net 기반 image segmentation을 적용한다.
-
장점: 기존 2D CNN 활용 가능
-
한계: 투영 과정에서 기하학적 왜곡 발생
18.2.2 Bird's Eye View(BEV) Projection
PointPillars: Fast Encoders for Object Detection from Point Clouds 논문(2019)
또 다른 대표적인 투영 방식인 BEV(Bird's Eye View, 조감도) Projection을 활용하는 연구도 존재한다.
LiDAR flatten: (z축) 차 위에 다른 차가 겹치지 않는다는 가정 하에 가능하다.
-
PointPillars
-
point cloud를 BEV space로 flatten한 뒤, grid마다 PointNet 수행
-
이후 2D CNN으로 object detection 수행
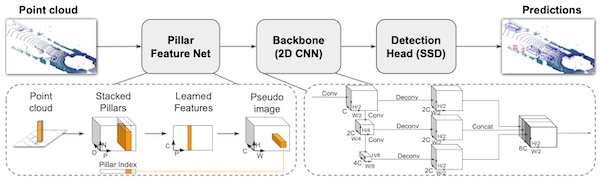
: pillar 수(\~10000), : 각 pillar에 속한 point의 최대 수, : 입/출력 채널 수(10\~64)
-
PolarNet
-
보다 고해상도 표현을 위한 극좌표계 투영을 적용한다.
-
,
-
ring-connected convolution을 적용한다.
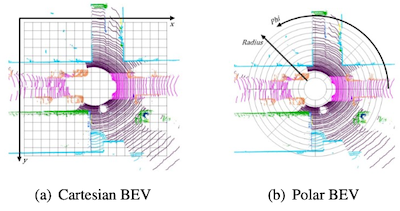
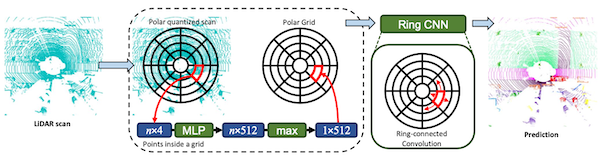
데카르트 좌표계(Cartesian coordinates)를 극좌표계(Polar coordinates)로 변환하면, 먼 거리에 더 많은 공간을 할당할 수 있다.
주의: ring convolution에서 를 함께 convolve해야 한다.
18.3 Dense Voxels
Ivan Nikolov, How to Voxelize Meshes and Point Clouds in Python
다음은 voxelization 예시다.
 |
 |
voxelization은 point 를 voxel size 에 따라 양자화화하는 과정이다.
의 lower bound: 으로 가정한다.
텐서 기준으로는 크기 를 갖는 4D 텐서 를 만든 뒤, 위치 에 feature 를 삽입한다. ( : 의 upper bound )
18.3.1 3D CNN on Voxelized Point Cloud
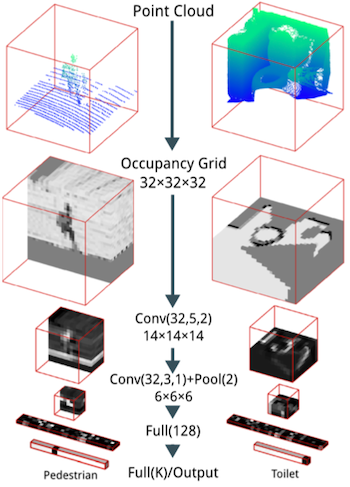
VoxNet: A 3D Convolutional Neural Network for Real-Time Object Recognition 논문(2015)
Volumetric and Multi-View CNNs for Object Classification on 3D Data 논문(2016)
딥러닝 기반으로 voxel grid를 처리한 대표적인 초기 연구를 살펴보자.
- VoxNet: 2D CNN을 3D로 확장
-
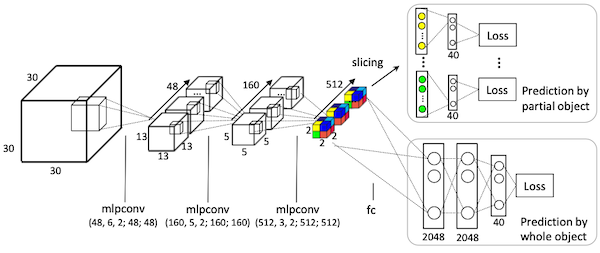
Volumetric CNN
-
Subvolume supervision: 과적합 문제를 해결하기 위해, 일부의 voxel feature map만으로 예측
-
Orientation pooling: CNN은 rotationally-invariant하지 않으므로, 다양한 각도의 voxel을 계산 후 pooling으로 통합
| Subvolume Supervision | Orientation Pooling |
|---|---|
 |
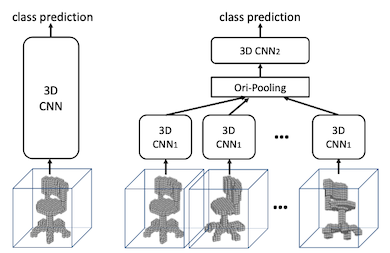 |
18.4 Point Set
18.4.1 PointNet
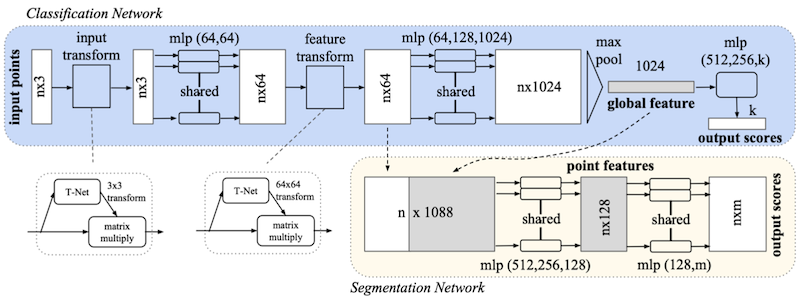
PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation 논문(2016)
PointNet은 딥러닝 기반으로 point cloud를 직접 처리한 대표적인 연구이다.
- MLP 레이어 및 symmetric 연산(e.g., max pooling)으로 구성
Permutation-invariant (입력 벡터의 element 순서와 무관하게 동일 출력 생성)
- T-Net: 입력을 canonical space로 선형 변환하기 위한 소형 모델
Rigid motion invariant (translation, rotation, reflection 등 변환에 불변)
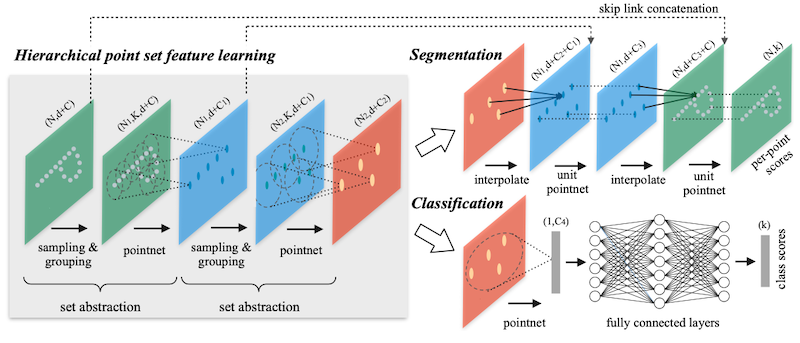
18.4.2 PointNet++
PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space 논문(2017)
후속 연구에서는 neighbor 정보를 보다 잘 모델링한 PointNet++를 제안하였다.
kNN: k-Nearest Neighbors
(생략)
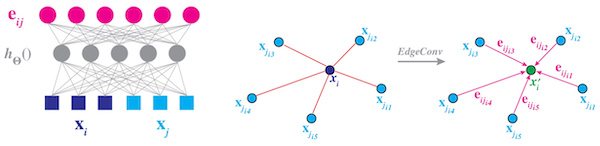
18.4.3 DGCNN
DGCNN은 (PointNet++와 달리) Euclidean space에서 neighborhood를 정의하였다.
(생략)
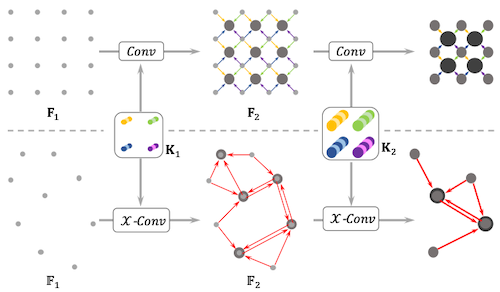
18.4.4 PointCNN
PointCNN에서는 permutation matrix 를 학습하였다.
(생략)
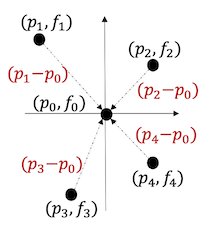
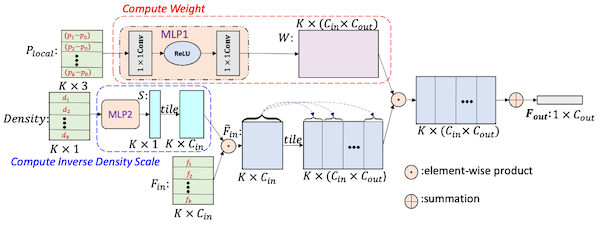
18.4.5 PointConv
PointConv: Deep Convolutional Networks on 3D Point Clouds 논문(2018)
PointConv는 feature 사이의 차이 및 point cloud 밀도를 고려하는 dynamic weights를 학습하였다.
 |
 |
(생략)
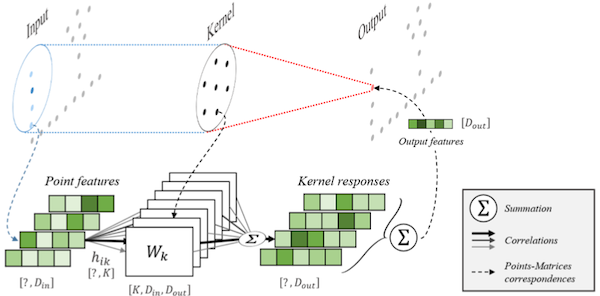
18.4.6 KPConv
KPConv: Flexible and Deformable Convolution for Point Clouds 논문(2019)
(생략)
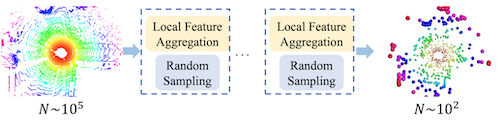
18.4.7 Rand-LA Net
RandLA-Net: Efficient Semantic Segmentation of Large-Scale Point Clouds 논문(2019)
(생략)
18.5 Sparse Voxels
Submanifold Sparse Convolutional Neural Networks 논문(2017)
4D Spatio-Temporal ConvNets: Minkowski Convolutional Neural Networks 논문(2019)
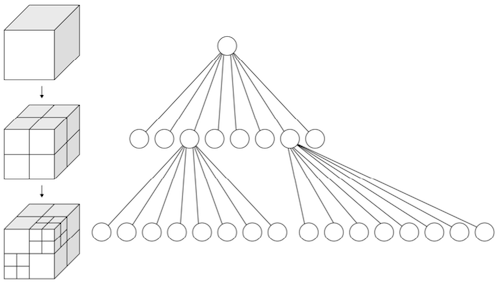
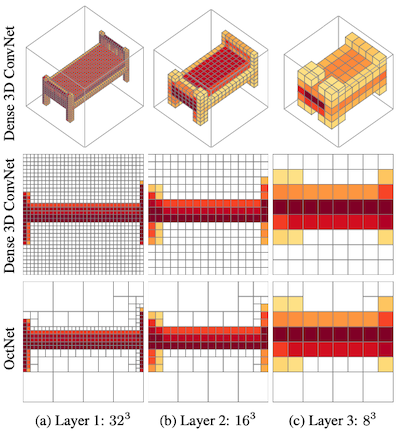
18.6 Octree
OctNet: Learning Deep 3D Representations at High Resolutions 논문(2016)
Octree는 3D 정육면체 공간을 8개 노드로 재귀적으로 분할하는 data structure이다.
- OctNet
(생략)
18.7 Hybrid
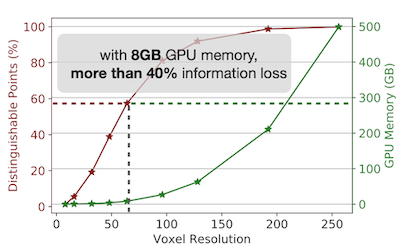
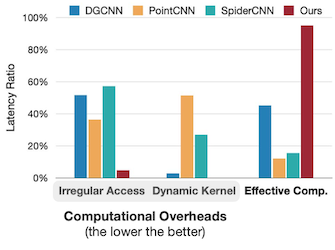
다음 도표는 point, voxel 연산에서 생기는 bottleneck을 보여준다.
- voxel: 복셀 해상도에 따른 계산 비용 및 메모리 사용량 증가폭이 크다. (왼쪽 도표)
8GB GPU 메모리 예산 기준, 40% 이상의 정보 손실이 발생한다.
- point cloud: 불규칙한 메모리 접근으로 인한 지연시간 낭비가 발생한다. (오른쪽 도표)
| 해상도(x) 구분 가능한 점&GPU 메모리(y) |
Computational Overheads, Effective Comp. |
|---|---|
 |
 |
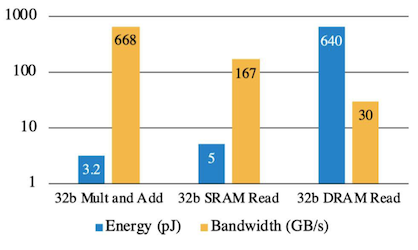
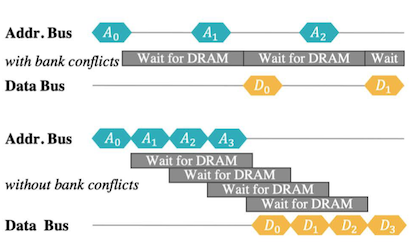
Notes: 메모리 연산 비용
Off-chip DRAM 접근은 훨씬 비용이 드는 연산이다.
random 메모리 접근은 bank conflict가 발생할 수 있어 비효율적이다.
SRAM/DRAM Access Memory Access Patterns
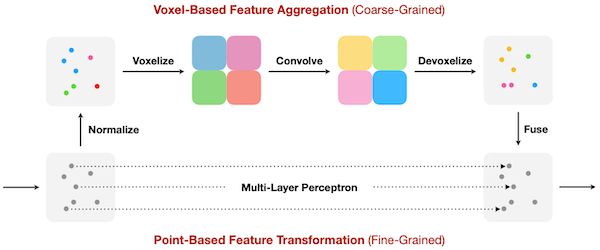
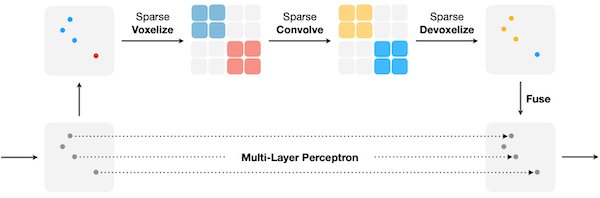
18.7.1 Point-Voxel CNN (PVCNN)
위 논문에서는 point, voxel branch를 나누는 설계로 효율성을 개선하였다.
-
voxel-based branch: 복셀 단위 convolution으로, 메모리 locality 향상
-
point-based branch: 고해상도 3D 데이터를 메모리 효율적인 point 형태로 표현
(voxelization에 의한 정보 손실을 point-based branch로 보완)
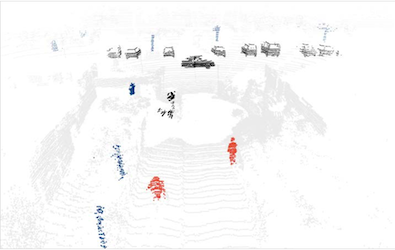
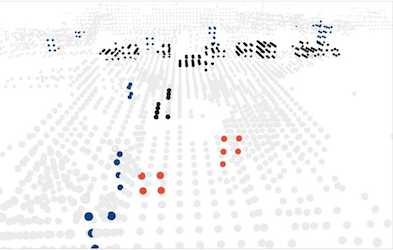
아래: point branch, 위: voxel branch (e.g., 파란색 점: 파란색 복셀에 포함 - dense한 특성을 가진다)
Notes: Voxelization에 따른 정보 손실 예시
Input Scene Voxelized Scene
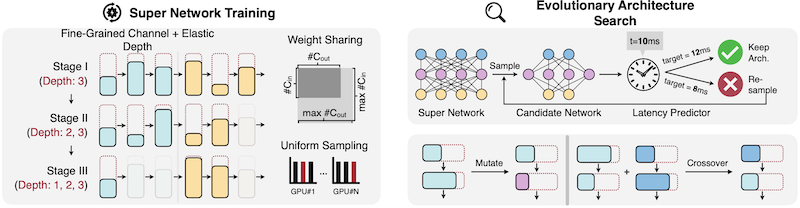
18.7.2 Sparse Point-Voxel Convolution (SPVConv)
Searching Efficient 3D Architectures with Sparse Point-Voxel Convolution 논문(2020)
후속 연구에서는 sparse convolution을 도입하여 voxel branch의 해상도를 향상시켰다.
3D-NAS 알고리즘을 통해 최적 구조를 탐색한다.
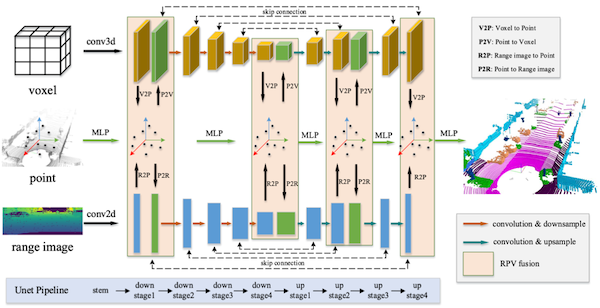
18.7.3 Range-Point-Voxel Convolution (RPVConv)
(생략)
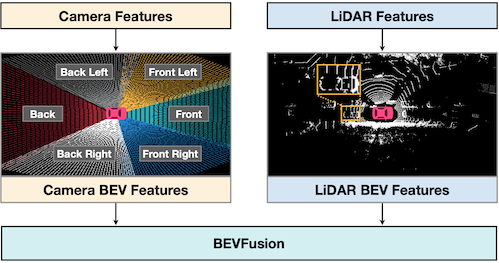
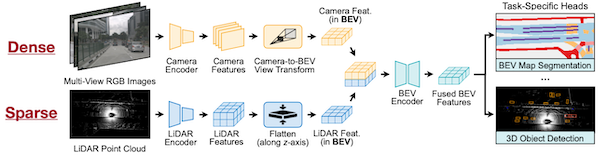
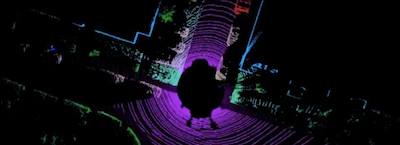
18.7.4 BEVFusion: Multi-task, Multi-sensor Fusion
BEVFusion: Multi-Task Multi-Sensor Fusion with Unified Bird's-Eye View Representation 논문(2022)
다음은 자율주행 자동차에서 얻은 센서 데이터(multi-view camera, LiDAR 등) 예시다.
BEVFusion은 카메라 데이터(dense image)를 BEV로 변환한 뒤, LiDAR 데이터(sparse point cloud)를 통합하여 3D 정보를 생성한다.