7 Neural Architecture Search (Part I)
Lecture 07 - Neural Architecture Search (Part I) | MIT 6.S965
다음은 수동으로 설계한 신경망에, 추가로 Neural Architecture Search(NAS)를 통해 찾은 신경망을 비교한 결과다.
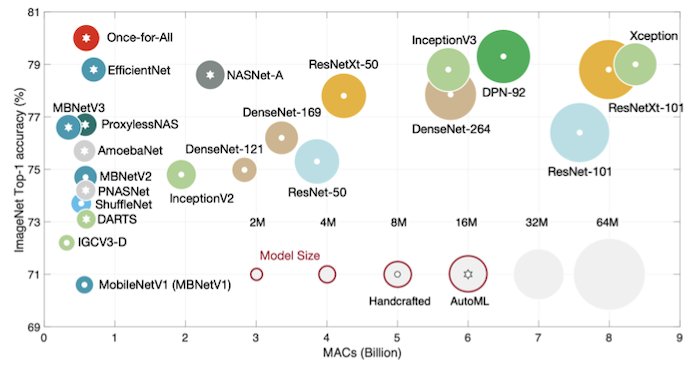
- NAS 최적 신경망: 더 적은 연산량(MACs)으로 (수동으로 설계한 신경망보다) 더 좋은 정확도를 획득했다.
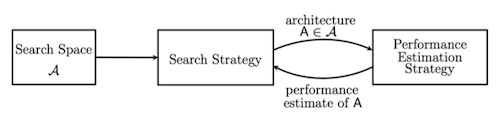
NAS의 목표는 탐색 전략과 성능 평가 전략을 통해, 탐색 공간에서 최적의 신경망 구조를 획득하는 것이다.
성능은 accuracy, efficiency, latency 등 다양한 지표가 될 수 있다.
7.4 Search Space
Neural Architecture Search: Insights from 1000 Papers 논문(2023)
DAG(Directed Acyclic Graph): feature maps이나 module blocks이 노드, operation(e.g., convolution, pooling)이 에지로 연결된 그래프
최적 모델 구조를 찾기 위해서는, 먼저 탐색할 탐색 공간을 먼저 정의해야 한다. 다음은 대표적인 탐색 공간의 종류와, 해당 탐색 공간에서 찾는 하이퍼파라미터를 나타낸 도표다.
| Search Space (Structure) |
Operation types | DAG topology | macro hyperparameters | cell topology | e.g. |
|---|---|---|---|---|---|
| Macro (DAG) |
O | O | O | - | NASBOT(Kandasamy et al., 2018) EfficientNet(Tan and Le, 2019) |
| Chain-Structured (Chain) |
O | - | O | - | MobileNetV2(Sandler et al., 2018) ProxylessNAS(Cai et al, 2019) |
| Cell-based (Duplicated Cells) |
O | - | - | O | DARTS(Liu et al., 2019c) |
| Hierarchical (Varied) |
O | O | O | O | MNASNet(Tan et al, 2019) Auto-DeepLab(Liu et al., 2019b) |
7.4.1 Cell-based Search Space
Learning Transferable Architectures for Scalable Image Recognition 논문(2017)
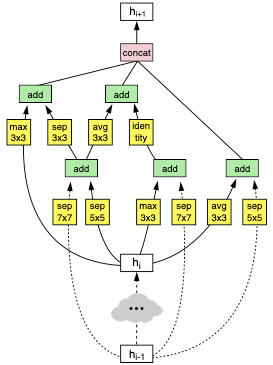
다음은 NASNet에서 정의한 cell-based search space이다.
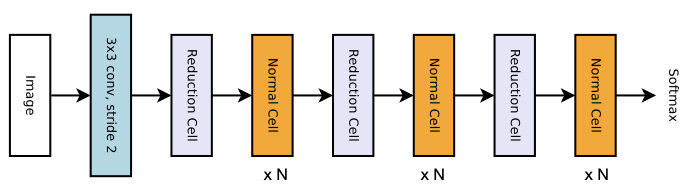
| Normal Cell | Reduction Cell | |
|---|---|---|
| 역할 | 해상도가 유지된다. | 해상도가 줄어든다. |
| 예시 | 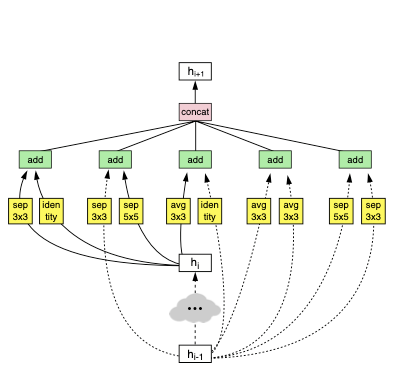 |
 |
-
Reduction Cell: 해상도를 줄인다.(stride > 2)
-
Normal Cell: 해상도가 유지된다.(stride = 1)
이때, RNN controller를 이용하여 candidate cell를 생성한다.
| RNN controller | |
|---|---|
| 강화 학습 방식 | 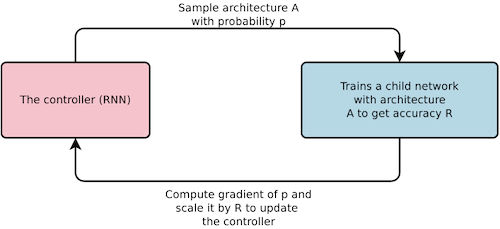 |
| 추론 | 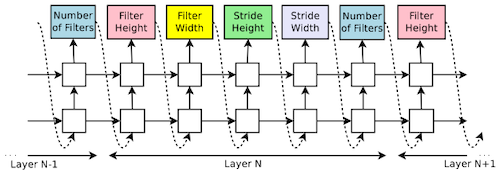 |
📝 예제 1: Cell-level Search Space size
다음 조건에서 NASNet의 search space size를 구하라.
-
2 candidate input
-
input transform operations
-
combine hidden states operations
-
#layers
🔍 풀이
탐색 공간의 크기는 다음과 같다. 이처럼 cell-based search space는 exponential하게 커지는 문제점을 갖는다.
라고 하면 search space 크기는 이 된다.
7.4.2 Hierarchical Search Space: Network-Level
MnasNet: Platform-Aware Neural Architecture Search for Mobile 논문(2018)
Trilevel Neural Architecture Search for Efficient Single Image Super-Resolution 논문(2021)
hierarchical search space란, 여러 계층으로 나누어진 탐색 공간을 의미한다.
- two level: cell or chain-structured space + macro-level architecture hyperparameters
대표적으로 MobileNetV2를 백본으로 사용하는 MNasNet이 있다.
- three level: 추가로 kernel hyperparameter 등을 탐색한다.
7.4.2.1 Network-Level Search Space for Image Segmantation
Auto-DeepLab: Hierarchical Neural Architecture Search for Semantic Image Segmentation 논문(2019)
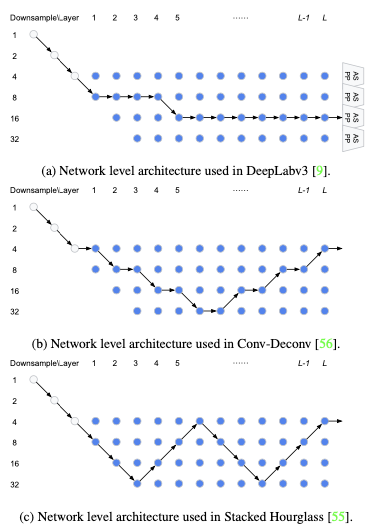
Image Segmentation 도메인을 다루는 Auto-DeepLab 논문에서는, 레이어의 upsampling/downsampling 설정을 탐색한다.
-
가로: #layers, 세로 Downsample(해상도가 줄어든다.)
-
파란색 nodes를 연결하는 path가 candidate architecture가 된다.
7.4.2.2 Network-Level Search Space for Object Detection
NAS-FPN: Learning Scalable Feature Pyramid Architecture for Object Detection 논문(2019)
Object Detection 도메인을 다루는 NAS-FPN 논문에서는, FPN 모델을 기반으로 탐색 공간을 구성한다.
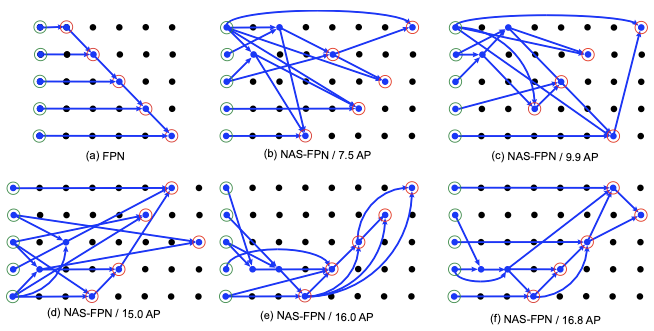
AP: average precision(평균 정밀도)
NAS로 찾은 최적 모델은 수동으로 설계한 모델과 매우 다른 양상을 보였다. 하지만 정확도와 irregularity 사이에서 균형을 맞출 필요가 있는데, 하드웨어 구현이 어렵고 병렬화의 이점을 누리는 것이 힘들기 때문이다.
7.5 Design the Search Space
예를 들어 가중치를 공유하는 학습 방법의 경우, high-quality model과 low-quality model의 adaptation이 서로 충돌하기 때문에, 최종 convergence state에 악영향을 미치게 된다. 따라서, 기존보다 효율적인 탐색 공간을 찾으려는 연구가 진행되어 왔다.
7.5.1 RegNet: Cumulative Error Distribution
RegNet 논문에서는 cumulative error distribution을 기반으로, 최적의 탐색 공간을 설계했다.
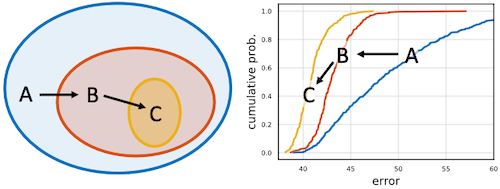
- design space 에서 시작하여, 적은 error를 갖는 모델로 구성된 최적의 design space 를 찾는다.
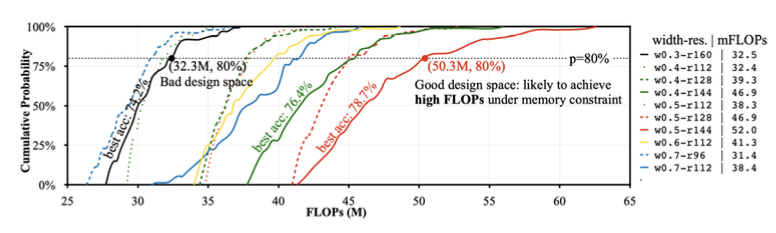
7.5.2 MCUNetV1: FLOPs distribution
MCUNetV1 논문의 TinyNAS에서는 MCU 제약조건에 최적인 탐색 공간을 찾기 위해, 슈퍼넷에 포함된 서브넷 연산량(FLOPs)의 CDF를 관찰한다.
-
동일한 memory constraint에서는 FLOPs가 클수록 큰 model capacity를 갖는다.
-
큰 model capacity는 높은 accuracy와 직결된다.
7.5.3 PreNAS: Zero-Cost Proxy
PreNAS: Preferred One-Shot Learning Towards Efficient Neural Architecture Search 논문(2023)
PreNAS는 학습 전 gradient-based proxy를 기반으로, high-quality architecture를 주로 포함하는 탐색 공간을 구성한다.
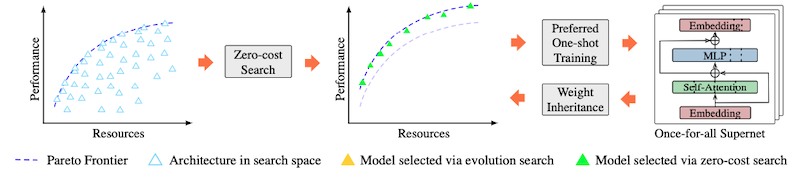
다양한 제약 조건에서 top 개 high-quality architecture를 찾아서 탐색 공간을 구성한다.(preferred search space)
- : constraints
zero-cost proxy는 SNIP을 변형한 scoring function을 사용한다.