6 Parallel Processors (Part I)
6.1 Interconnect
parallel hardware 설계자들은 모든 processor가 공유하는 단일 physical address space를 만들려고 하였다. 이를 shared memory multiprocessor(SMP)라고 하며, multicore chip은 거의 이 방식으로 설계된다.
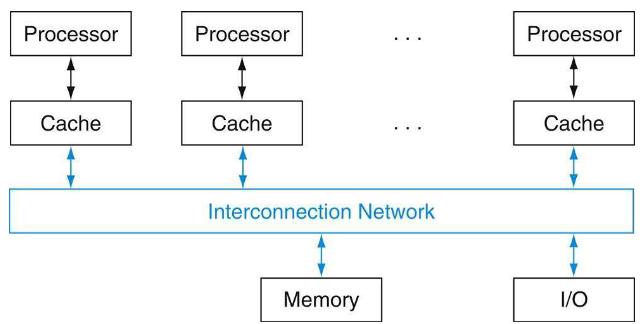
따라서 CPU, memory, I/O controllers 간에 interconnection이 필요하게 되었다. 대표적인 예시로 bus interconnect가 있다.
-
bus: shared communication channel
-
bus에 연결된 device들은 wire를 공유하기 때문에, 트래픽이 많아지면 bottleneck이 발생한다.
-
wire length, connections 수 등으로 performance가 제한된다.
따라서 최근에는 switch를 이용한 high-speed serial connections 같은 대안이 존재한다.(network에서 주로 사용한다.)
6.1.1 I/O Register Mapping
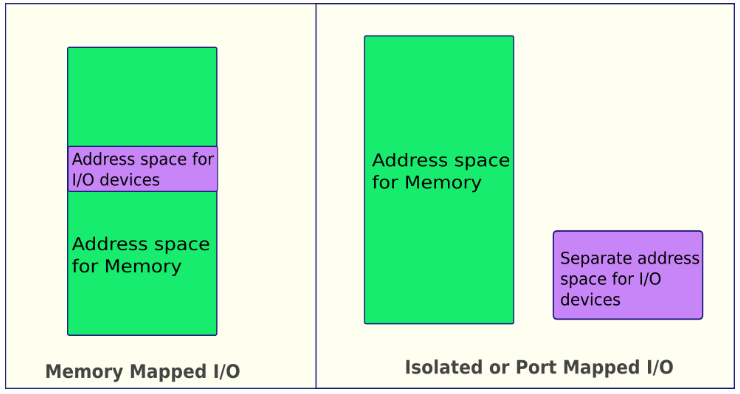
CPU가 I/O에 접속하는 방법은 크게 두 가지로 나눌 수 있다.
-
memory mapped I/O
-
memory register와 I/O resister가 하나의 연속된 memory address 영역에 할당된다.
따라서 compiler가 최적화하는 것을 방지하기 위해, 프로그래밍 시 I/O 영역의 변수를
volatile타입으로 선언해야 한다. -
address decoder가 I/O address를 구분한다.
-
address translation mechanism을 사용해서, 오직 kernel(OS)을 통해서만 접근할 수 있도록 한다.
kernel: memory에 상주하는 OS의 핵심 부분. OS는 전원이 켜짐과 동시에 항상 필요한 부분만 memory에 올려서 사용하게 된다.(memory 낭비를 막기 위함)
-
ARM, MIPS 등이 대표적이다. 적은 복잡성 덕분에 로직이 간단하며 임베디드 시스템에서 많이 사용된다.
-
I/O mapped I/O
-
memory와 I/O가 별개의 address 영역에 할당된다.
-
Intel x86이 대표적이다.
-
마찬가지로 kernel mode에서만 접근할 수 있다.
6.1.3 Polling
polling이 I/O status register를 주기적으로 확인하는 방식이다.
-
device가 ready 상태라면
do ()opertion을 시작한다. -
error일 때는 action을 취한다.
-
장점으로는 hardware cost가 적지만, 단점으로는 장치 register를 계속 읽으므로 CPU time의 낭비가 크다.
-
주로 작고 저사양인 real-time embedded system에서 사용한다.
6.1.4 interrupt
interrupt란 I/O device 등에서 예외가 발생하면, interrupt 사실을 CPU에게 알려 처리할 수 있도록 하는 방식이다.
-
interrupt는 I/O device에서 interrupt controller로 전달되고, interrupt controller는 해당 interrupt 종류를 파악해서 CPU에게 전달한다. 이를 IRQ(Interrupt Request)라고 한다.
-
OS는 interrupt 종류에 맞는 interrupt handler를 호출(invoke)하여 처리한다.
OS가 현재 CPU가 실행 중인 program을 중단시키고, 우선순위가 높은 task를 CPU에게 할당한다.
참고로 interrupt는 software interrupt, hardware interrupt로 나눌 수 있다.
-
software interrupt: DIV 명령어 처리에서 0으로 나누거나, 할당되지 않은 공간에 access하는 등의 예외 상황
-
hardware interrupt: 키보드 입력, 디스크 제어 등
6.2 Heterogeneous Computing
heterogeneous computing(이기종 컴퓨팅)이란 CPU만이 아닌 다른 종류의 coprocessor(GPU, FPGA 등)를 장착한 시스템을 의미한다.
이중에서도 GPU는 parallel processing에 특화된 manycore processor 구조를 가지고 있다.
6.2.1 Parallel programming difficulties
parallel programming에서 발목을 잡는 어려운 문제 세 가지 예시를 살펴보자.
-
partitioning(=mapping)
작업을 병렬 조각으로 나누는 일
-
coordination(=load-balancing, synchronization)
부하를 균등하게 하고 동기화하는 일
-
communications overhead(=data movement)
통신 overhead를 줄이는 일
6.2.2 Parallel programming and Amdahl's law
parallel programming에서 speedup이 얼마나 어려운지는 Amdahl's law를 통해 체감할 수 있다.
Amdahl's law를 speedup과 관련된 식으로 바꾸면 다음과 같다.
-
Exec time before: 원래 실행시간
-
Exec time affected: 개선될 (부분의) 시간( )
-
Amount of improvement: 개선될 부분의 비율
이때 Exec time before를 1로 가정하면, 식은 다음과 같이 바꿔서 쓸 수 있다.
📝 예제 1: 속도 개선의 어려움
processor 수를 100 processors로 하여 90배 speedup을 달성하고 싶다고 하자. 원래 program에서 최대 몇 %까지 sequantial part가 있어도 되는지 구하라.
🔍 풀이
계산 시 를 얻을 수 있다. 따라서 sequential part는 0.1% 이하로 남아야 한다.
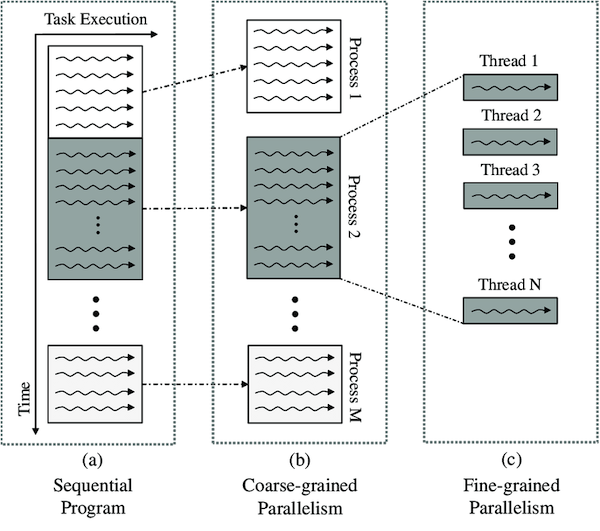
6.3 Process vs Thread
process와 thread는 다음과 같은 차이점이 있다.
- process
실행 중인 프로그램(A program in execution). instructions 집합으로 활동의 단위다.(a unit of activity)
-
process는 최소 하나의 thread를 가지며, multiple thread를 가질 수 있다.
-
CPU resource를 할당받는다.(CPU time, code/data/stack과 같은 memory 등)
-
thread
process 안의 제어 흐름(control flow) 단위다.
-
한 process 안의 모든 thread는 memory 및 resource를 공유한다.(kernel 개입 없이 서로 통신)
-
local variable은 독립적으로 사용하고, global variable은 공유한다.
-
process에 비해 새로운 thread를 생성하는 편이 시간과 비용이 절약된다.
대표적으로 interrupt에 의한 context switching이 있다. process의 경우 cache, data, stack, heap 초기화로 인한 비용이 드는데, thread는 자신의 stack 영역만 초기화하면 되기 때문에 비용이 훨씬 작다.
context switching 때 process는 PCB(Process Control Block)에 의해 관리되며, thread는 'process 내 TCB(Task Control Block)'에 의해 관리된다.
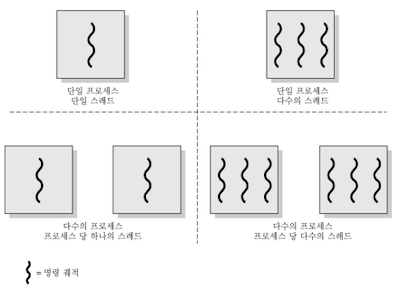
다음은 threading(단일 스레딩), multithreading(다중 스레딩)의 예시를 나타낸 그림이다.
한 process에서 single-thread, multi-thread의 자원은 다음과 같이 나뉘게 된다.
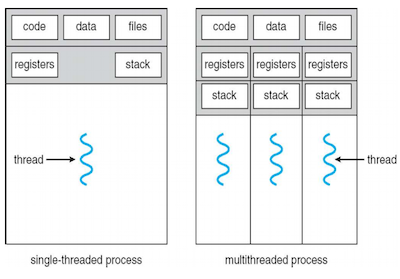
PC register도 thread마다 독립적으로 할당된다.
6.3.1 Temporal Multi-Threading
그렇다면 Multithreading은 어떻게 구현하는 걸까? Multithreading 중에서도 TMT(Temporal Multi-threading)의 구현은 크게 두 가지 방식으로 나뉜다.
Multi-Threading은 한 명이 여러 일을 멀티태스킹하는 TMT, 여러 명이 여러 일을 스케줄링으로 분담하는 SMT로 비유할 수 있다.
- Coarse-grained multithreading
L2 cache miss와 같은 long stall이 발생헀을 때만 thread를 switch한다.
-
한 clock cycle에 여러 thread에서 instruction을 issue한다.
-
hardware가 단순하여 구현이 쉽지만, data hazards와 같은 short stall의 hiding이 불가능하다.
-
Fine-grained multithreading
cycle마다 threads를 switch한다.
thread switching을 위한 hardware를 두어 overhead를 줄인다.
-
만약 한 thread가 stall되면 다른 thread를 실행한다.
예를 들어 thread A에서 cache miss가 발생하면, latency동안 다른 thread B를 실행한다. 이것이 바로 context switching을 통한 latency hiding이다.
-
thread들은 interleave instruction execution 방식으로 처리한다.
한 clock cycle에 한 thread만 instruction을 issue한다/
6.3.2 Simultaneous Multi-Threading
SMT(Simultaneous Multi-Threading)이란 여러 thread들이 동시에 동작하는 multi-threading 기법이다.
Intel에서 Hyper-threading이라고 불리는 기술이다. SMT와 비교하여 TMT를 fake multi-threading으로 부르기도 한다.
-
function unit(issue slot)만 available하면, 다른 thread instruction을 동시에 수행한다.
-
여러 thread들이 동시에 동작하기 때문에 hardware resource가 더 필요하다.
-
dependency를 scheduling, register renaming을 통해 관리한다.
6.3.3 Multi-Threading Example
4개의 thread A, B, C, D가 있다고 할 때, 각 방법별 multi-threading을 통한 instruction 실행을 살펴보자.
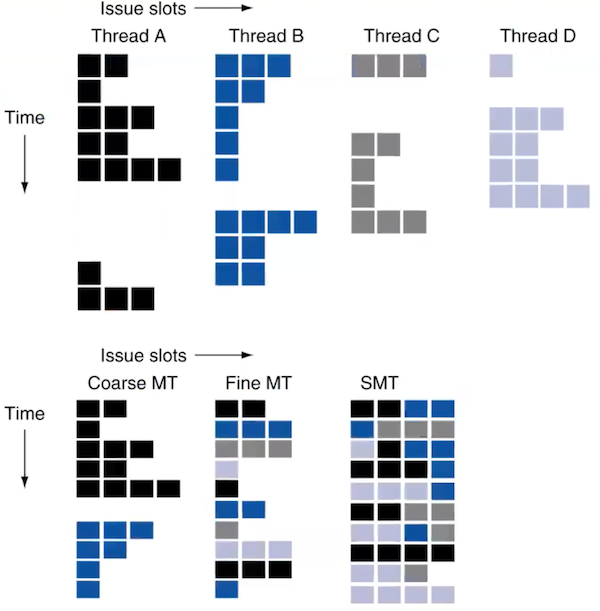
-
Coarse MT: Thread A에서 long stall이 발생하자 thread B로 switch했다.
-
Fine MT: cycle마다 thread A, B, C, D를 switch했다.
-
SMT: 가능한 issue slot에서 instruction을 동시에 실행했다.
6.4 shared memory multiprocessor
parallel hardware system은 physical address를 공유하는가 아닌가에 따라 크게 두 가지로 나뉜다. 이 중에서도 single physical address space를 공유하는 system이 바로 SMP(shared memory multiprocessor)이다.
lock을 이용해서 shared variables를 synchronize한다.
parallel hardware system의 memory access 방식도 두 가지로 나눌 수 있다.
- UMA(Uniform Memory Access)
모든 processor가 서로 연결되어 하나의 memory를 공유한다.
단, 단일 memory controller를 사용하므로 bandwidth가 제약되고, bottleneck이 발생할 수 있다.
- NUMA(Non-Uniform Memory Access)
각 processor가 자신의 local memory를 갖는다.
자체 local memory에서 memory access time은 빠르지만, 다른 processor의 memory에 접근할 때는 성능이 저하된다.
6.4.1 programming for SMP
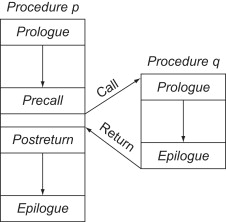
SMP를 위한 Thread Programming을 알아보자. 우선 thread programming을 적용하지 않은 callback function의 흐름과 thread programming을 비교해 보자.
- callback function
instruction stream이 caller에서 callee로 전환됐다가, 작업이 끝나면 caller로 돌아오는 흐름을 갖는다.(즉, 동시에 실행되지 않는다.)
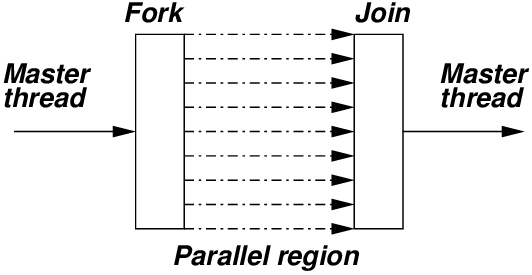
- thread programming
thread1(master)에서 thread2(slave)가 실행되는 동시에, thread1도 병렬로 처리할 수 있다.
6.4.2 Pthread Programming
Pthread(=POSIX thread)는 thread programming을 위한 API(Application Programming Interface)이다.
POSIX는 IEEE standard로, UNIX, Linux, Solaris, Mac OS X, MS Windos에서 사용한다.
C언어의 경우 관련 헤더 파일이
/usr/include/디렉터리에 있는pthread.h에 정의되어 있다. thread library를 사용하는 각 source file에 포함되어야 한다.
다음은 A, B vector를 더하는 vector addition Pthread Example이다.
-
pthread_t threads[4]: thread를 4개 생성한다. -
pthread_create(&threads[i], NULL, TaskCode, (void *)&args[i]): thread를 정의한다.-
&threads[i]: thread id를 저장할 address -
NULL: thread attribute (default: NULL) -
TaskCode: thread가 실행할 function -
(void *)&args[i]: function 인자
-
-
pthread_join: thread complete를 기다린다.-
threads[i]: 종료될 thread id -
NULL: return value (default: NULL)
-
#include <pthread.h>
#include <stdio.h>
#include <stdlib.h>
extern int S[100], A[100], B[100];
void *TaskCode(void *argument)
{
int tid;
tid = *((int *) argument); // pointer cast
for(int i=tid*25; i<(tid+1)*25; i++){ // loop unrolling
S[i] = A[i] + B[i];
}
return NULL;
}
int main (int argc, char *argv[])
{
pthread_t threads[4];
int args[4];
int i;
for (i = 0; i < 4; ++i){
args[i] = i;
pthread_create(&threads[i], NULL, TaskCode, (void *)&args[i]);
}
/* wait for all threads to complete */
for (i = 0; i < 4; ++i){
pthread_join(threads[i], NULL);
}
exit(EXIT_SUCCESS);
}
6.5 shared memory multiprocessor programming example
📝 예제 2: sum reduction
100 processor UMA에서 100,000개 숫자를 더한다고 하자. Sum Reduction을 구현하라.
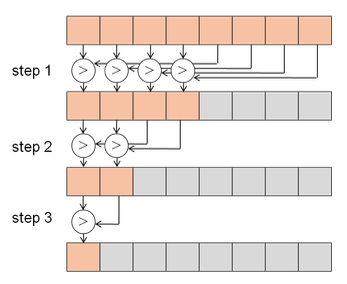
reduction: divide and conquer. 각 reduction step에서는 synchronize가 필요하다.
-
각 processor는 ID를 0~99 범위 내에서 갖는다.(
myid) -
processor마다 숫자 1,000개를 계산하도록 partitioning한다.
🔍 풀이
- step1: 우선 각 processor가 숫자 1,000개에서 원소 2개씩을 더한다.
sum[myid] = 0;
for (i = 1000*myid; i < 1000*(myid+1); i++){
sum[myid] = sum[myid] + totalData[i];
}
- step2: partial sums을 구현하면 다음과 같다.
for (int stride=100/2; stride > 0; stride /= 2) {
if (myid < stride) {
sum[myid] = sum[myid + stride]
}
synch(); // 다른 thread 연산이 끝날 때 까지 barrier
}
6.6 Message Passing
process는 (1) 다른 processor와 협력하지 않는 process, (2) 영향을 주고 받으며 resource를 공유하는 process(cooperating process)로 나눌 수 있다. 그런데 각 processor는 private physical address space를 갖기 때문에, processor 사이에서 공통된 규칙의 hardware send/receives message가 필요하다.
비슷하게 network로 연결된 다른 computer도 각자의 private memory과 OS를 갖는다. Ethernet/switch, Internet과 같은 I/O system을 통해 연결되는데, 이때도 message passing이 필요하다.
- IPC(Inter-Process Communication): cooperating process 사이에서 서로 data를 주고 받는 행위, 또는 그 방법과 경로
이러한 clusters를 구성하면서 얻는 장단점은 다음과 같다.
-
장점
-
high availability(어떤 컴퓨터가 고장이 나면, 다른 컴퓨터에서 즉시 업무를 대신할 수 있다.)
-
scalability
-
cost-effective
-
-
단점
-
administration cost
-
low interconnect bandwidth
6.6.1 Message Passing Interface
따라서 distributed memory systems에서 parallel programming을 위한 communication protocol로 MPI(Message Passing Interface)를 사용한다.
주로 HPC(High-Performance Computing)에서 사용한다.
MPI_Send(),MPI_Recv(),MPI_Broadcast()...
다음은 MPI Programming을 이용한 vector addition 예시다.
#include <mpi.h>
#include <stdio.h>
#include <stdlib.h>
#define TAG 0
int main(int argc, char *argv[])
{
int buff[25], numprocs, myid;
int i;
MPI_Status stat;
MPI_Init(&argc, &argv);
MPI_Comm_size(MPI_COMM_WORLD, &numprocs); // 현재 예제에서 numprocs = 4로 가정한다.
MPI_Comm_rank(MPI_COMM_WORLD, &myid); // processor id를 저장한다.
// id 0 processor = master processor
if (myid == 0) {
int S[100], A[100], B[100]; // A, B는 이미 초기화되어 있다고 가정
for (i = 1, i<numprocs; i++) {
MPI_Send(A, 25, MPI_INT, i, TAG, MPI_COMM_WORLD);
MPI_Send(B, 25, MPI_INT, i, TAG, MPI_COMM_WORLD);
}
int offset = 0;
for (i = 1; i < numprocs; i++) {
MPI_Recv(&S[offset], 25, MPI_INT, i, TAG, MPI_COMM_WORLD, &stat);
offset += 25;
}
}
else {
int Sum[25];
MPI_Recv(A, 25, MPI_INT, 0, TAG, MPI_COMM_WORLD, &stat);
MPI_Recv(B, 25, MPI_INT, 0, TAG, MPI_COMM_WORLD, &stat);
for (i = 0; i < 25; i++) {
Sum[i] = A[i] + B[i];
}
MPI_Send(S, 25, MPI_INT, 0, TAG, MPI_COMM_WORLD);
}
MPI_Finalize();
return 0;
}
📝 예제 3: sum reduction + MPI
100 processor UMA에서 100,000개 숫자를 더하는 예제 2번 sum reduction을 MPI를 사용하여 구현하라.
🔍 풀이
- step 1: 각 processor에서 수행하는 partial sums
sum = 0;
for (i = 0; i < 1000; i++){
sum = sum + myData[i]
}
- step 2: reduction
processors 절반은 send, 나머지 절반은 receice, add를 수행한다.
send, receive는 동시에 synchronization도 수행한다.
limit = 100; half = 100; // 100개 processor
do {
half = (half + 1) / 2; // send와 receive 분배
// send
if (myid >= half && myid < limit){
send(myid - half, sum);
}
// receive, sum
if (myid < (limit/2)){
sum = sum + receive();
}
limit = half;
} while (half == 1); // final sum