4 Processor (Part II)
instruction이 수행되는 five stages을 복습하면 다음과 같다.
-
IF: Instruction Fetch
-
ID: Instruction Decode & register read
-
EX: Execute(ALU)
-
MEM: Memory Access
-
WB: Write Back
아래는 5 stage를 시간별로 표기한 도표이다. total time을 비교하면 다음과 같다.(single-cycle 기준)
| instr | IF | register read | ALU op | memory access | Register write | total time |
|---|---|---|---|---|---|---|
| ld | 200ps | 100ps | 200ps | 200ps | 100ps | 800ps |
| sd | 200ps | 100ps | 200ps | 200ps | 700ps | |
| R-format (add, sub, ...) | 200ps | 100ps | 200ps | 100ps | 600ps | |
| branch (beq) | 200ps | 100ps | 200ps | 500ps |
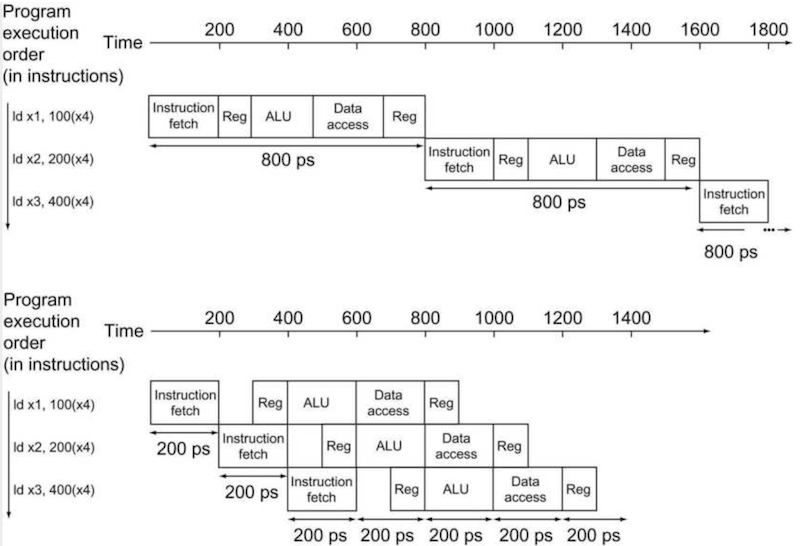
하지만 실제로는 한 instruction이 끝나는 모든 시간을 기다린 뒤, 다음 instruction을 수행할 필요는 없다. 여러 instruction을 동시에 수행하는 pipelining을 적용하면 된다.
실제 pipelined processor는 보통 12~20개 이상의 stage 수를 가진다.
4.10 single-cycle vs pipelined performance
4.10.1 single-cycle performance
우선 pipeline을 적용하지 않은 단일 사이클 구현을 보자.(nonpipelined)
-
모든 instruction 수행되는 시간 = 한 clock cycle
-
따라서 한 clock cycle = 가장 오랜 시간이 걸리는 instruction의 수행 시간(예: 800ps)가 되어야 한다.
만약 4번째 instruction이 시작하기 전까지 걸린 total time이라면 단순히 800 * 3 = 2400ps가 된다.
요약하자면 단순히 CPI만을 봤을 때는 CPI = 1이지만, single-cycle path에서는 clock cycle이 가장 긴 instruction(거의 확실하게 store instruction)에 의해 결정되므로 비효율적이다.
4.10.2 pipelined performance
pipelining(파이프라이닝)이란 여러 instruction을 동시에 중첩되어 수행하는 구현 기술이다.
single-cycle(단일 사이클)에서 pipeline 방식의 clock cycle의 길이는 pipeline stage 하나를 수행하는 시간에 따라 결정된다.
-
pipeline stage 하나가 수행되는 시간 = 한 clock cycle
-
따라서 한 clock cycle = 가장 오랜 시간이 걸리는 stage의 수행 시간(예: 200ps)에 의해 결정된다.
만약 worst-case가 별도로 존재하지 않고 모든 stage가 완벽히 균형이 맞춰져 있다고 가정하면, pipelined processor에서의 instruction 수행 시간은 다음과 같이 계산된다.
-
: pipelined processor에서의 한 instruction 수행 시간
-
: non-pipelined processor에서의 한 instruction 수행 시간
-
: pipeline stage의 개수
즉, 이상적인 가정 하에서는 pipeline stage가 많으면 많을수록, instruction 수행 시간이 더 짧아지게 된다. 예를 들어 5개의 pipeline stage가 있다면, pipelined processor에서의 한 instruction은 800ps / 5 = 160ps만에 수행될 수 있다.
📝 예제 1: single-cycle vs pipelined
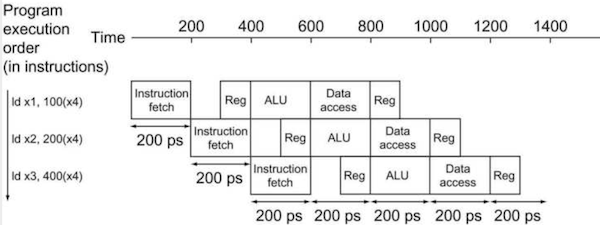
아래 그림과 같은 instruction 3개가 있다. 현재 3개가 있는 instruction에서 1,000,000개를 늘려서, instruction 1,000,003개가 있다고 가정했을 때 single-cycle와 pipelined 구현의 total time을 비교하라.
기본적으로 ID의 Reg, WB의 Reg가 cycle 절반 시간으로 수행된다고 가정한다. 서로 다른 instrucion의 WB와 ID가 동일한 하나의 cycle에 처리될 수 있는 것이다.
pipelining 중에는 ALU가 어떤 input을 처리하고 있던 도중에 다음 input이 들어오면 안 되므로, clock에 의해 guard하고 있다가 끝나면 다음 input을 받는다.(sequential하게 수행된다)
🔍 풀이
우선 instruction 3개만 있을 때의 total time은 다음과 같다.
-
single-cycle: 2400ps
-
pipelined: 1400ps
잘 보면 pipeline stage 수가 5개이지만, 이상적인 case와 달리 5배의 speedup를 얻지 못한 것을 알 수 있다.
그 다음 instruction 1,000,003개가 있을 때의 total time은 다음과 같다.
-
single-cycle: 1,000,000 * 800ps + 2400ps = 800,002,400ps
-
pipelined: 1,000,000 * 200ps + 1400ps = 200,001,400ps
speedup을 계산하면 800,002,400/200,001,400으로 약 4.00을 얻을 수 있다.
4.11 RISC-V instruction sets for pipelining
RISC-V는 처음부터 pipelining을 고려하며 설계되었다.
-
RISC-V instruction은 모두 32bit 길이를 갖는다.
따라서 IF, ID 과정을 훨씬 간단하게 수행할 수 있다.
x86 같은 경우 instruction 길이가 1~17byte까지 다양하게 변하기 때문에, IF, ID 과정에서 pipelining을 구현하기 매우 힘들다. 한 차례 instruction을 더 단순한 연산으로 변환하여 pipelining을 적용한다.
-
RISC-V instruction format은 몇 가지 종류밖에 없으며, 모든 instruction field에서 destination register와 첫 번째 source register가 동일한 위치로 통일되어 있다.
따라서 ID, read register 과정을 훨씬 간단하게 수행할 수 있다.
-
RISC-V instruction에서 memory access는 오직 load, store instruction에서만 수행된다.
따라서 EX 단계에서 target address를 계산하고 MEM 단계에서 memory access를 수행하게 된다.
x86은 operand로 register를 강요하지 않는다. 따라서 ALU가 연산을 할 때부터 memory access를 수행해야 하며, 이는 pipelining을 매우 어렵게 만든다.
-
memory access가 오직 한 cycle만을 차지한다.
x86은 memory access가 여러 cycle을 차지한다.
4.12 pipeline bubble
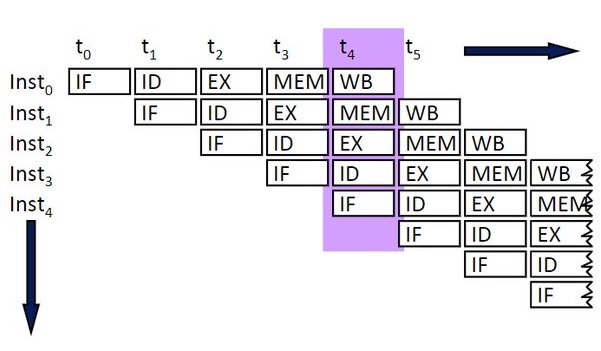
pipeline에서 모종의 이유로 stage 수행이 지연되는 경우를 pipeline stall 혹은 pipeline bubble이라고 지칭한다. 아래는 pipeline 초기 단계의 snapshot이다.
-
Instruction 0이 수행되는 시간:
-
한 cycle이 200ps라고 하면 1000ps가 걸린 것이다.
-
single-cycle에서는 800ps가 걸렸다.(register read/write = 100ps) 따라서 하나의 instruction을 수행하는 latency 자체는 늘어난 셈이다.
-
fully pipelined되지 않은 까지는 pipeline bubble이 존재한다.(initial delay)
하지만 fully pipelined된 부터는 pipeline bubble이 존재하지 않게 된다. 이러한 상태를 steady state라고 한다.
pipelined processor에서 한 instruction의 total time 자체는 늘어났지만, 전체 throughput을 보면 single-cycle 구현을 쉽게 상회한다.
전체 instruction을 처리하는 데 드는 시간은, initial delay부터 나머지 instruction 개수에 cycle period를 곱한 값을 합산하면 구할 수 있다.
4.13 Pipeline Hazard
하지만 다음 instruction을 다음 cycle에 이어서 수행할 수 없는 경우가 있다. 이를 pipeline hazard라고 하며 총 세 가지 종류가 있다.
-
structural hazards
-
data hazards
-
control hazards
4.13.1 structural hazard
structural hazard(구조적 해저드)란 기본적으로 당장 가용할 수 있는 hardware resource 부족(busy)해서 발생하는 hazard이다.
세탁기 예시에서는 빨래가 끝나고 건조기에 돌려야 하는데, 이전 사람의 빨래가 늦게 끝나고 건조기도 늦게 돌린 탓(conflict)에 pipeline stall이 발생하게 된 것이다.
가령 세 instruction으로 구성된 pipeline에 네 번째 instruction을 추가한다고 가정하자. memory는 하나(data path가 한 개)라고 생각한다.
-
첫 번째 instruction: stage 4에서 MEM(Data access)를 수행한다.
-
추가된 네 번째 instruction: stage 1에서 IF를 위해 memory에서 instruction을 읽어온다.
가정대로 memory가 하나만 있다면 memory access가 겹치게 되어 pipeline stall이 발생할 것이다.
4.13.2 data hazard
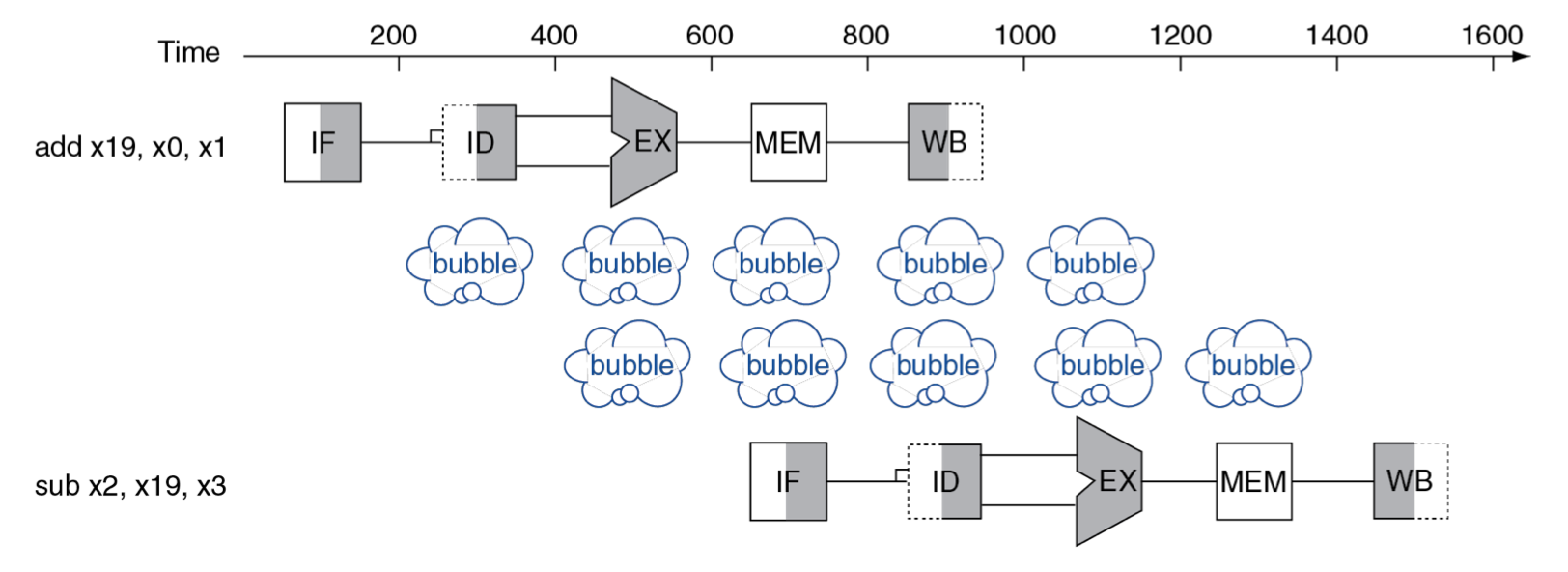
data hazard(데이터 해저드)란 다음 instruction이 현재 instruction의 결과를 필요로 할 때 발생하는 hazard이다. 요약하면 instruction dependence에 의해 발생한다.
add "x19", x0, x1 # x19를 write
sub x2, "x19", x3 # x19를 read (WAR dependence)
-
add: stage 5인 WB에서 write register 수행 -
sub: stage 2인 ID에서 instrucion decoding 후 read register 수행
따라서 sub가 stage 5를 모두 기다리게 두면 긴 pipeline stall이 발생하게 된다.
색칠:
add의 경우 오직 4 stage를 수행하며 MEM(memory access)를 거치지 않으므로 흰색으로 둔다.왼쪽 색칠: write register(WB) or write memory(WB)
오른쪽 색칠: read register(IF, ID) or read memory(MEM)
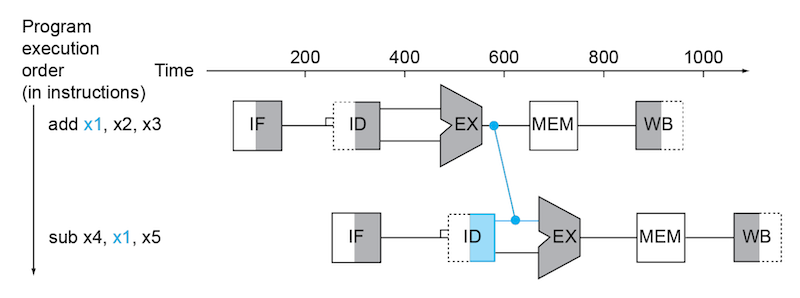
하지만 EX 단계가 끝난 값을 바로 다음 ID 과정에 전달할 수 있다면 이러한 pipeline stall을 겪을 필요가 없다. 이러한 기법을 forwarding(전방전달) 혹은 bypassing(우회전달)이라고 한다.
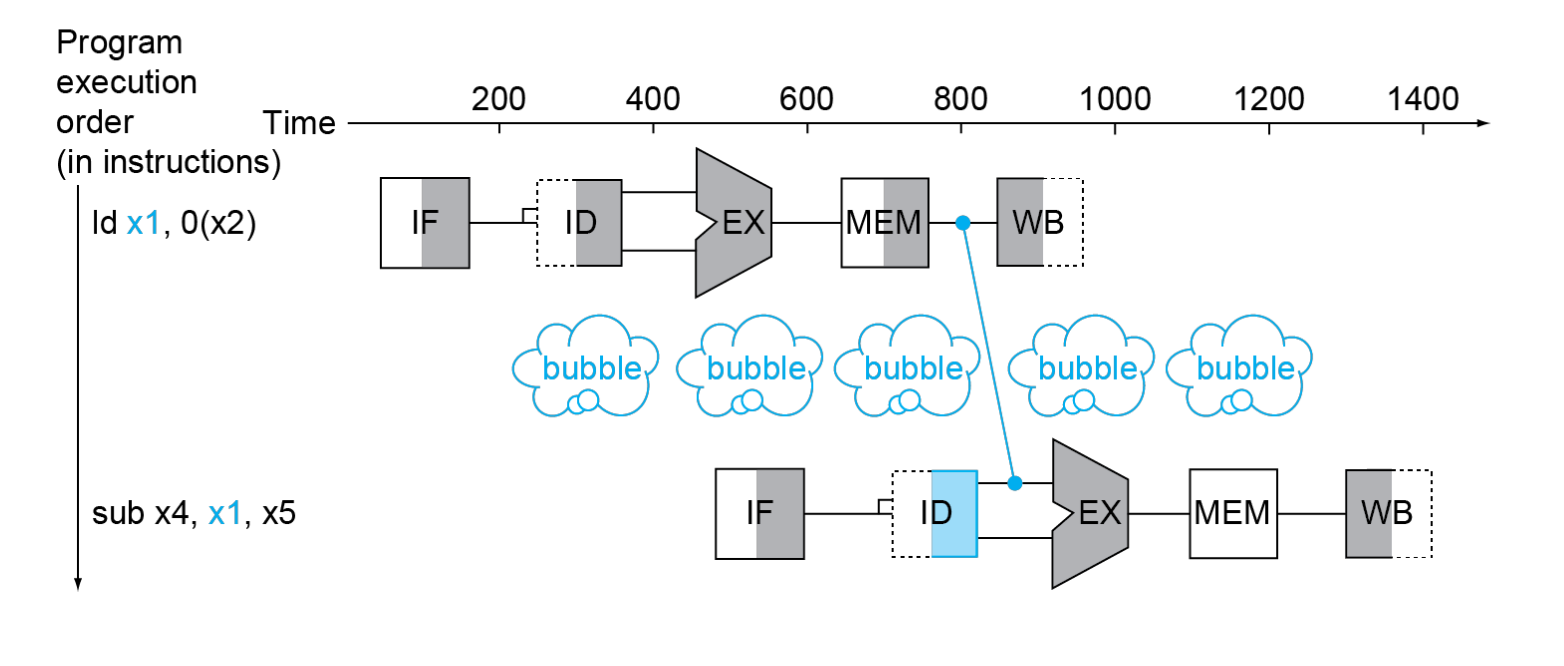
4.13.2.1 load-use data hazard
하지만 언제나 forwarding으로 모든 pipeline bubble을 피할 수 있는 것은 아니다. 예를 들어서 아래와 같이 load instruction 바로 다음으로 값을 읽는 instruction이 있을 수 있다.(load-use data hazard)
ld "x1", 0(x2) // x1 load
sub x4, "x1", x5 // x1 read
forwarding을 하더라도, ld instruction의 MEM(memory access)까지는 sub instruction에서 x1 값을 읽을 수 없다.
4.13.2.2 code scheduling
하지만 dependence가 없는 다른 instruction을 그 사이에 먼저 수행한다면 pipeline stall을 방지할 수 있다. 다음과 같은 C code가 있다고 하자.
a = b + e; // b,e: memory에서 읽어온다.
c = b + f; //
이를 RISC-V로 순서대로 compile할 경우 다음과 같다.
initial delay 계산 시 load-use data hazard로 인한 pipeline bubble을 더해야 한다.
ld x1, 0(x0) # x1: load b
ld x2, 8(x0) # x2: load e
add x3, x1, x2 # x3(a) = b + e <- load-use data hazard
sd x3, 24(x0) # a를 memory에 저장
ld x4, 16(x0) # x4: load f
add x5, x1, x4 # x5(c) = b + f <- load-use data hazard
sd x5, 32(x0) # c를 memory에 저장
하지만 code를 scheduling(reorder)하여 stall을 막을 수 있다.(주로 compiler가 이 작업을 수행한다.)
ld x1, 0(x0) # x1: load b
ld x2, 8(x0) # x2: load e
ld x4, 16(x0) # x4: load f
add x3, x1, x2 # x3(a) = b + e
sd x3, 24(x0) # a를 memory에 저장
add x5, x1, x4 # x5(c) = b + f
sd x5, 32(x0) # c를 memory에 저장
📝 예제 2: code scheduling
아래 예시에서 두 instruction 사이에 얼마나 많은 instruction을 reorder해서 채워야 bubble을 막을 수 있을까?(forwarding은 고려하지 않는다.)
add x3, x1, x2 // x3 write
sub x4, x3, x1 // x3 read
🔍 풀이
forwarding이 없다면 add WB 단계가 끝난 뒤, sub의 ID 단계로 전달되어야 한다. 이는 2 cycle이 걸린다. 따라서 2개의 instruction을 채워야 한다.(instruction distance: 3)
1 2 3 4 5
add IF ID EX Mem WB
Inst1 IF
Inst2 IF
sub IF ID
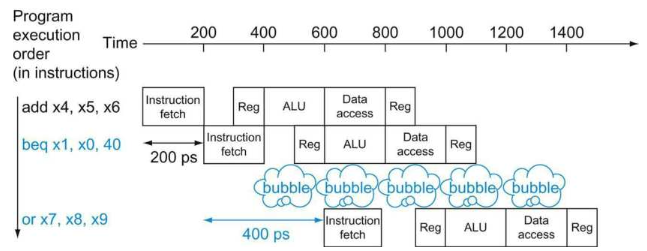
4.13.3 control hazard
control hazard(제어 해저드)란 conditional branch instruction의 outcome에 따라 fetching해야 하는 instruction이 달라지게 되어 생기는 hazard다.
- 단순히 branch의 taken/not-taken 결과를 기다린다면, 2cycle 동안 pipeline stall로 인한 손해를 보게 된다.
설령 hardware를 추가해서 stage 2에서 이미 branch outcome을 알 수 있다고 하더라도 최소 pipeline stall이 1 cycle은 발생한다.
따라서 control hazard를 방지하는 방법으로 branch outcome을 predict(예측)을 하는 해결책을 선택하게 됐다. 이 경우 pipeline이 언제나 올바른 instruction을 fetch할 수 없지만, 예측만 잘하면 branch는 pipeline stall 없이 계속 busy할 수 있게 된다.
MIPS에서는 data hazard를 해결하기 위해 code scheduling을 한 것처럼, 마찬가지로 관련이 없는 다른 instruction을 먼저 수행하는 delayed decision(지연결정) 방법을 같이 사용하기도 한다.
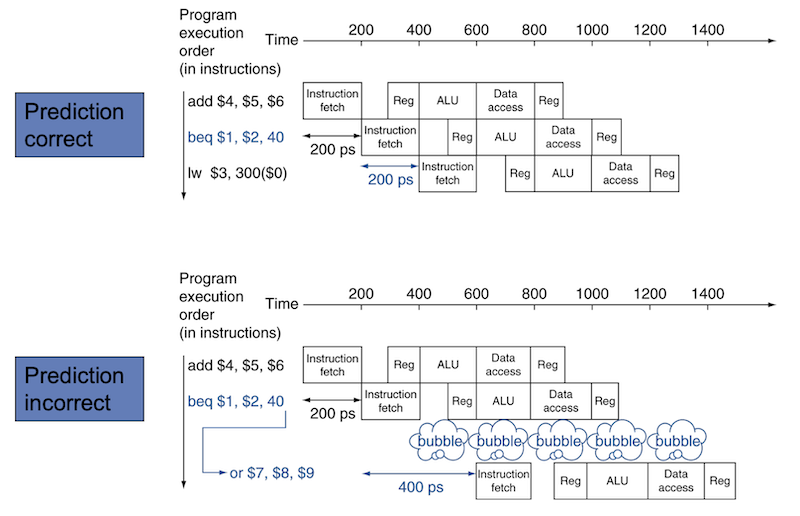
4.13.3.1 branch prediction
branch prediction은 특성상 다음 두 가지 결과가 발생하게 된다.
-
correct: stall이 일어나지 않는다.
-
incorrect: instruction canceling. flush out pipeline
branch prediction은 static, dynamic branch prediction 두 가지 분류로 나눌 수 있다.
대체로 static: not runtime이란 의미. 주로 compiling 단계에서 일어난다.
- static branch prediction
branch가 갖는 특성을 바탕으로 정한 규칙을 따르는 방식.
예시로 loop and if-statement의 BRFNT(Backward Taken, Forward Not Taken)가 있다. for문에서 i가 0부터 10까지 증가하는 경우, i = 10을 제외하고는 항상 같은 instruction 묶음을 fetch해서 수행한다.
- dynamic branch prediction
실제 program의 branch behavior를 측정(각 branch의 recent history를 record)한 뒤 그에 따라 예측하는 방식. static 방식보다 정확도가 더 높지만 더 많은 resource가 필요하다.
-
history는 branch prediction buffer(BPB, branch history table)에 기록한다.
-
ALU가 계산한 branch target address는 branch target buffer에 기록된다.
4.13.3.2 dynamic branch prediction: 1-bit predictor
branch history를 바로 직전의 taken, not-taken만 기록하는 1-bit predictor을 예시를 통해 살펴보자. 아래는 자주 볼 수 있는 형태의 중첩된 for loop를 C로 작성한 코드이다.
-
2번의 branch prediction 실패가 연속으로 발생한다.
-
inner loop이 끝날 때(1), outer loop가 다음 iteration으로 넘어갈 때(2)
-
outer loop가 끝날 때, branch prediction이 실패한다.
C code
for (i = 0; i < m; i++) {
for (j = 0; j < 100; j++) {
//...
}
}
4.13.3.3 dynamic branch prediction: 2-bit predictor
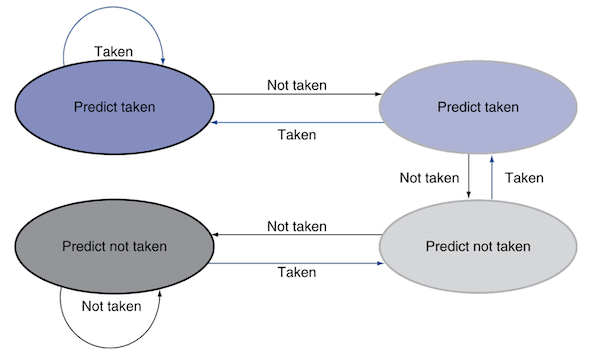
(생략)